级联多回路反馈设计
此示例展示了如何在Simulink®Control Design™中使用优化两个级联反馈循环万博1manbetx控制系统设计者.
本例设计了机身模型中两个级联反馈回路的控制器,使得加速度组件(阿兹)追踪参考讯号,最大上升时间为0.5秒。本例中的反馈循环结构使用body rate (问)作为内部反馈回路,加速度(阿兹)作为外部反馈回路。
打开机身模型。
open_system (“scdairframectrl”)

两个反馈控制器分别是:
scdairframectrl / q控制-一个离散时间积分器和一个增益块稳定内循环。
open_system (“scdairframectrl / q控制”)

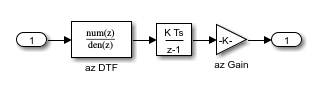
scdairframectrl / az控制-一个离散时间积分器,一个离散传递函数和一个增益块稳定外环。
open_system (“scdairframectrl / az控制”)
多回路系统中的解耦回路
级联反馈系统的典型设计过程是先设计内环,再设计外环。在控制系统设计者,可以同时设计两个回路;在设计多回路反馈系统时,默认考虑了回路之间的耦合效应。然而,当同时设计两个反馈回路时,可能需要对反馈回路进行解耦;也就是说,在调优内循环时删除外循环的影响。在本例中,您设计了内部反馈循环(问)与外环(阿兹)移除。
控制系统设计人员
设计一个控制器使用控制系统设计者,你必须:
选择要调优的控制器块。
创建您想要查看的开环和闭环响应。
对于这个例子,你可以:
启动一个预先配置好的控制系统设计者通过双击模型左下角的子系统来创建会话。
配置控制系统设计者使用下面的过程。
打开控制系统设计者,在Simulin万博1manbetxk模型中,在应用程序画廊,点击控制系统设计者.
在“编辑体系结构”对话框中,在块选项卡上,单击添加模块.在“选择要调优的块”对话框中,选择以下块,单击好吧.
scdairframectrl/q控制/q增益scdairframectrl/az控制/az增益scdairframectrl/az Control/az DTF
在信号选项卡中,在Simulink模型中定义的分析点将自动添加为万博1manbetx位置.
输入:
阿兹scdairframectrl /步骤—输出端口1输出:
scdairframectrl /机身模型—输出端口1

要使用所选的块和信号,请单击好吧.
在数据浏览器,反应节包含以下开环响应,其中控制系统设计者自动识别为开环设计的潜在反馈回路。
输出端口1
scdairframectrl/az Control/az DTF输出端口1
scdairframectrl/az控制/az增益输出端口1
scdairframectrl/q控制/q增益
为以下每个响应打开图形Bode编辑器。在控制系统设计者中,选择>波德编辑器.然后,在选择“编辑响应”下拉列表,选择相应的开环响应,单击情节.
的输出端口1开环
scdairframectrl/az Control/az DTF

的输出端口1开环
scdairframectrl/q控制/q增益

为了查看反馈系统的闭环响应,为一个新的输入-输出传递函数响应创建一个阶跃图。选择新剧情>新步骤.然后,在“新建步骤绘制”对话框中,在选择对图的响应下拉列表,选择新的投入产出转移响应.
添加scdairframectrl az / 1 /步骤作为输入信号和scdairframectrl /机身模型/ 1作为输出信号。

点击情节.
去除外部反馈回路的影响
在外循环波德编辑器图中,LoopTransfer_scdairframectrl_az_Control_az_DTF的波德编辑器,通过向上拖动幅度响应来增加反馈回路的增益。内循环的预兆编辑器图,LoopTransfer_scdairframectrl_q_Control_q_Gain的波德编辑器,也在变化。这种变化是反馈循环之间耦合的结果。一个更系统的方法是首先设计内部反馈回路,而外部回路是开放的。

为了在设计内环时消除外环的影响,在内环的开环响应中增加一个环路开口。
在数据浏览器,在反应区域,右键单击内部循环响应,并选择开放的选择.

在“开环传递函数”对话框中指定scdairframectrl/az Control/az DTF/1 .使用实例如回路开口。点击好吧.

在外环波德编辑器图中,通过拖动幅度响应来增加增益。由于循环是解耦的,因此内部循环的波德编辑器图不会改变。

现在可以在没有外环影响的情况下完成内环的设计,同时在设计外环的同时考虑内环的影响。
调整补偿器
控制系统设计者包含几个方法调优控制系统:
使用补偿器编辑器手动调优每个补偿器的参数。有关更多信息,请参见使用补偿器万博1manbetx编辑器优化Simulink块.
使用开/闭环博德,根轨迹或尼克尔斯编辑器图以图形方式调整补偿器极点,零点和增益。点击调优方法,并选择下的编辑器图形化优化.
使用时域和频域设计要求优化补偿器参数(需要Simulink design Optimization™软件)。万博1manbetx点击调优方法,并选择基于优化的调优.有关更多信息,请参见在单回路控制器设计上实施时间和频率要求(万博1manbetxSimulink设计优化).
使用基于闭环时间常数等参数的自动调优计算初始补偿器参数。点击调优方法,并选择PID调优,内部模型控制(IMC)调优,循环形成(需要鲁棒控制工具箱™软件),或者LQG合成.
完整的设计
补偿器参数满足设计要求:
scdairframectrl/q控制/q增益:
K_q = 2.7717622
scdairframectrl/az控制/az增益:
K_az = 0.00027507
scdairframectrl/az Control/az DTF:
分子=[100.109745 -99.109745]分母= [1 -0.88893]
闭环系统的响应如下图所示:

更新Simul万博1manbetxink模型
若要将补偿器参数写回Simulink模型,请单击万博1manbetx更新模块.然后您可以在非线性模型上测试您的设计。
另请参阅
相关的话题
您也可以从以下列表中选择一个网站: