利用模拟I/O数据设计PID控制器
这个例子展示了如何为不能线性化的植物调优PID控制器。你使用PID调谐器为您的模型识别一种植物。然后使用识别的植物整定PID控制器。
本例使用buck转换器模型,需要Simscape™Electrical™软件。
Buck变换器模型
Buck变换器将直流电转换为直流电。该型号使用开关电源将30V直流电源转换为稳压直流电源。转换器使用mosfet而不是理想开关建模,以确保设备通电电阻被正确表示。从参考电压到被测电压的转换器响应包括MOSFET开关。PID设计需要一个系统从参考电压到被测电压的线性模型。然而,由于开关,自动线性化的结果是零系统。在这个例子中,使用PID调谐器,您可以使用模拟而不是线性化来识别系统的线性模型。
有关创建buck转换器模型的更多信息,请参见巴克转换器(Simscape电气).
open_system (“scdbuckconverter”) sim卡(“scdbuckconverter”)
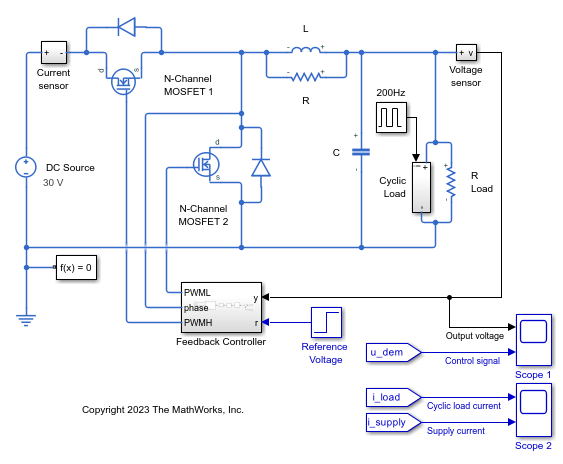
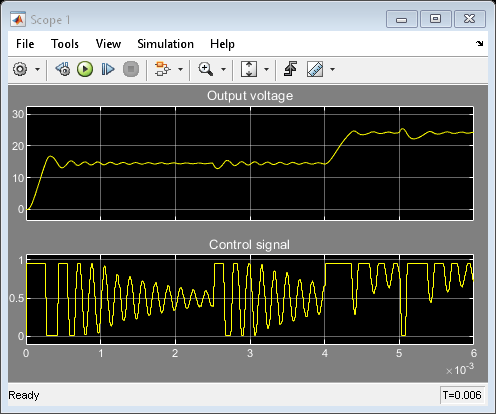
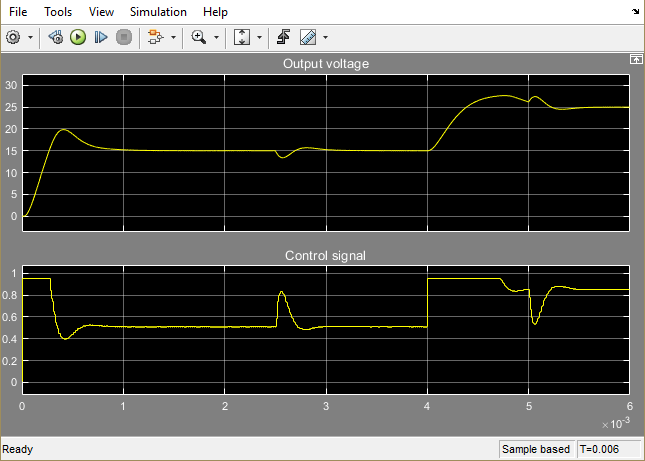
该型号配置了一个参考电压,在0.004秒时从15到25伏切换,负载电流从0.0025到0.005秒激活。控制器初始化时使用默认增益,导致超调和缓慢的稳定时间。
open_system (“scdbuckconverter /范围1”) open_system (“scdbuckconverter /范围2”)

模拟模型生成I/O数据
打开PID调谐器,在反馈控制器子系统,打开PID控制器阻塞对话框,然后单击调优.PID调谐器表示模型不能线性化并返回一个零系统。

PID调谐器在线性化失败时提供几种备选方案。在植物下拉列表中,可以选择以下方式:
进口-从MATLAB工作区导入一个线性模型。
Re-linearize闭环-在不同的模拟快照时间线性化模型。
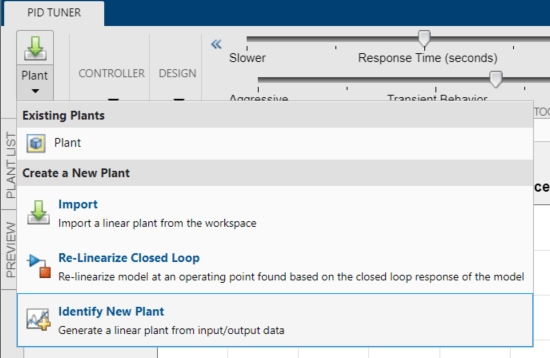
确定新工厂-利用测量数据确定工厂模型。
对于本例,单击确定新工厂打开植物鉴定工具。为了进行植物识别,必须为Simulink模型的停止时间指定一个有限值。万博1manbetx
打开一个模拟模型的工具来收集植物鉴定的数据,在植物鉴别选项卡上,单击Get I/O Data >模拟数据.
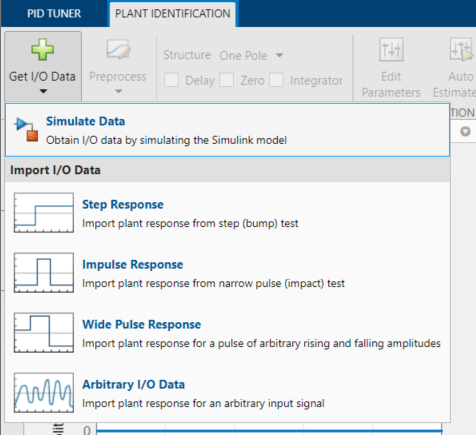
在模拟I / O数据选项卡,模拟控制器所看到的植物。软件暂时:
从模型中移除PID控制器块。
在PID块的输出位置注入一个信号。
在PID块的输入位置测量结果信号。
该数据描述了控制器所看到的植物的响应。的PID调谐器利用这些响应数据来估计线性植物模型。
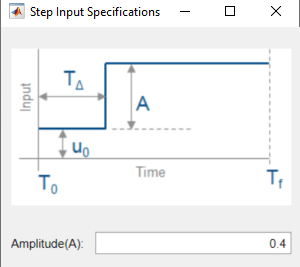
将输入信号配置为具有以下属性的步进输入:
样品时间(
 )= 5e-6 -控制器采样率。
)= 5e-6 -控制器采样率。抵消(
 )= 0.51 -输出偏移值,使转换器处于输出电压接近15V的状态,并给出控制器的运行点。
)= 0.51 -输出偏移值,使转换器处于输出电压接近15V的状态,并给出控制器的运行点。发病时间(
 )= 0.003 -在应用步进变化之前,允许转换器有足够时间达到15V稳态的延迟。
)= 0.003 -在应用步进变化之前,允许转换器有足够时间达到15V稳态的延迟。步骤振幅(
 )= 0.4 -控制器输出(工厂输入)适用于模型的步长。该值被添加到偏移值中使实际植物的输入步长从0.51到0.91。控制器输出(设备输入)限制在[0.01 0.95]的范围内。
)= 0.4 -控制器输出(工厂输入)适用于模型的步长。该值被添加到偏移值中使实际植物的输入步长从0.51到0.91。控制器输出(设备输入)限制在[0.01 0.95]的范围内。




选择显示输入的响应,显示偏移反应,显示识别数据.然后,单击运行仿真.的植物鉴别情节是更新。

红色曲线是偏移响应。偏移响应是植物对恒定输入的响应 .响应表明,模型有一些输入恒定的瞬态,特别是:
.响应表明,模型有一些输入恒定的瞬态,特别是:
转换器达到15V稳态的[0 0.001]秒范围。回想一下,这个信号是控制误差信号,因此当达到稳态时下降到零。
[0.0025 0.004]秒范围,当参考电压保持在15V时,转换器对施加的电流负载作出反应。
0.004秒点,参考电压信号从15V变为25V,导致较大的控制误差信号。
[0.005 0.006]秒范围,转换器对被移除的电流负载作出反应。
蓝色曲线显示了完整的设备响应,包括初始瞬变(时间< 0.001秒时显著)、对循环电流负载的响应(时间持续时间0.0025到0.005秒)、参考电压变化(在0.004秒时)和对步进测试信号的响应(在0.003秒时应用)。相比之下,红色曲线仅是对初始瞬态、参考电压阶跃和循环电流负载的响应。
绿色曲线是用于植物鉴定的数据。这条曲线是由于阶跃测试信号引起的响应变化,它是考虑到负反馈符号的蓝色(输入响应)和红色(偏移响应)曲线之间的差值。
若要使用测量数据识别植物模型,请单击应用.然后,返回到植物识别,单击关闭.
植物鉴别
PID调谐器使用模拟该模型生成的数据标识一个植物模型。您可以调整识别的植物参数,以便在提供测量输入时,识别的植物响应与测量输出相匹配。

您可以手动调整预估的模型。点击并拖动植物曲线和极点位置(X),调整识别的植物响应,使其与识别数据尽可能接近。
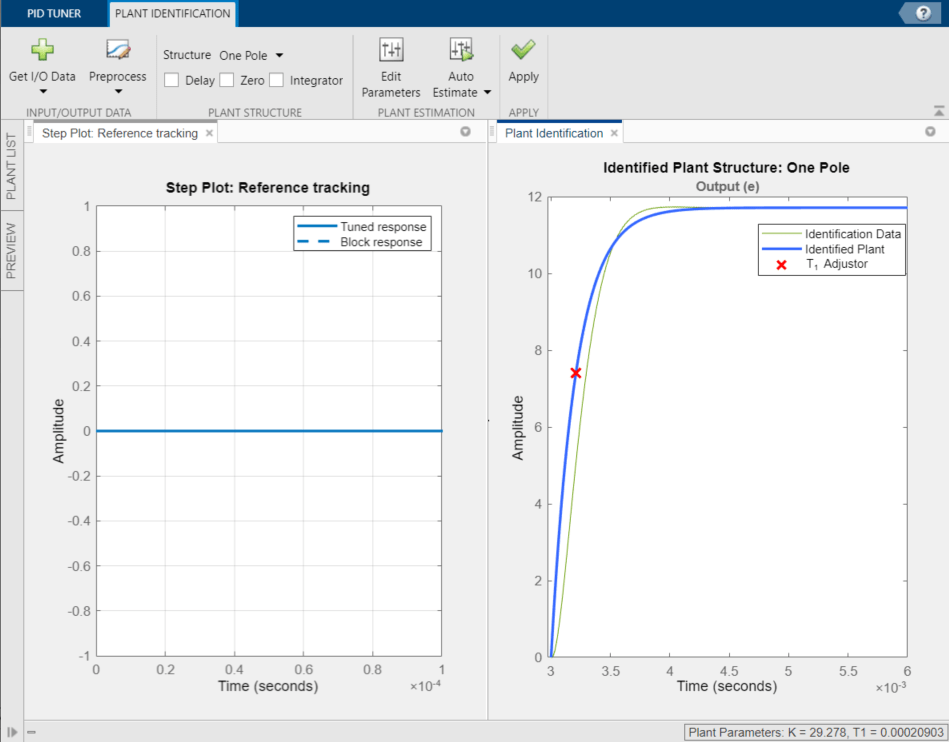
若要使用自动识别优化已识别的植物,请单击汽车估计.自动调优响应并不比交互调优好多少。鉴定出的植物与鉴定数据不匹配。改变植物结构以获得更好的匹配。
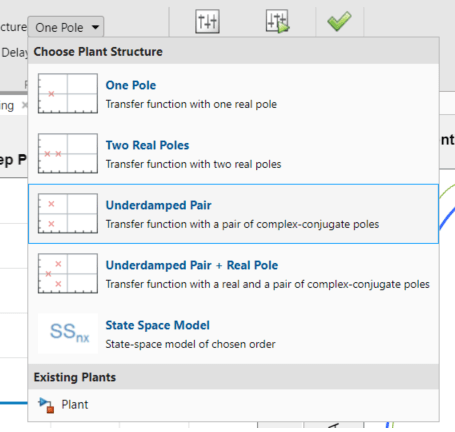
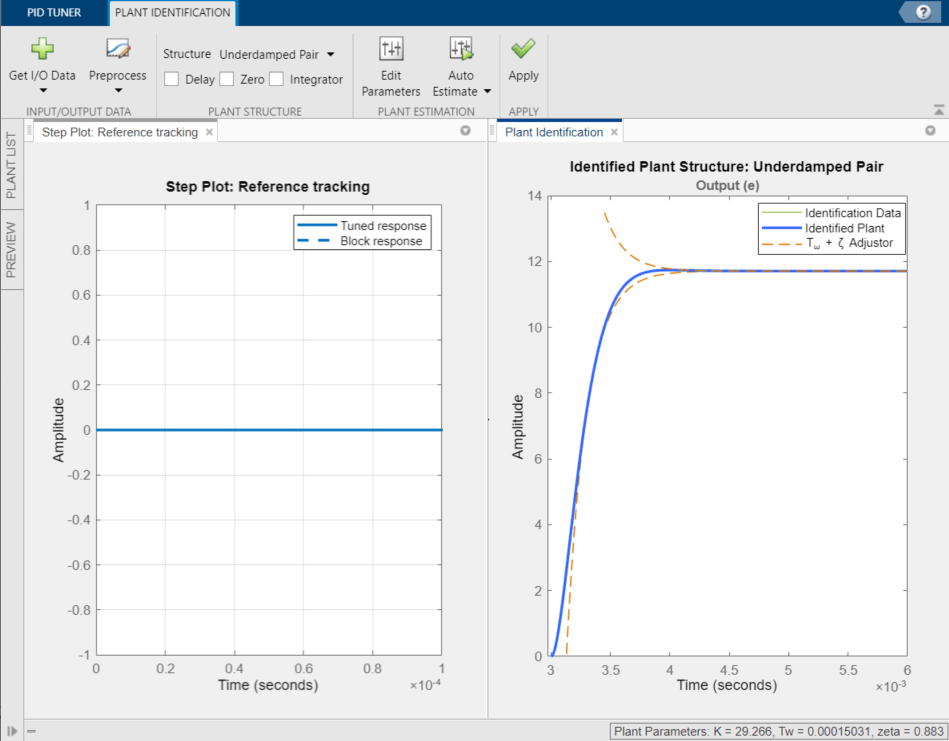
在“结构”下拉列表中选择欠阻尼的一对.
单击并拖动二阶信封,以尽可能接近匹配识别的数据(几乎严重阻尼)。
点击汽车估计微调植物模型。
单击,将已识别的模型指定为控制器调优的当前设备应用.PID调谐器然后为已识别的植物自动调优控制器并更新参考跟踪一步阴谋。
控制器调优
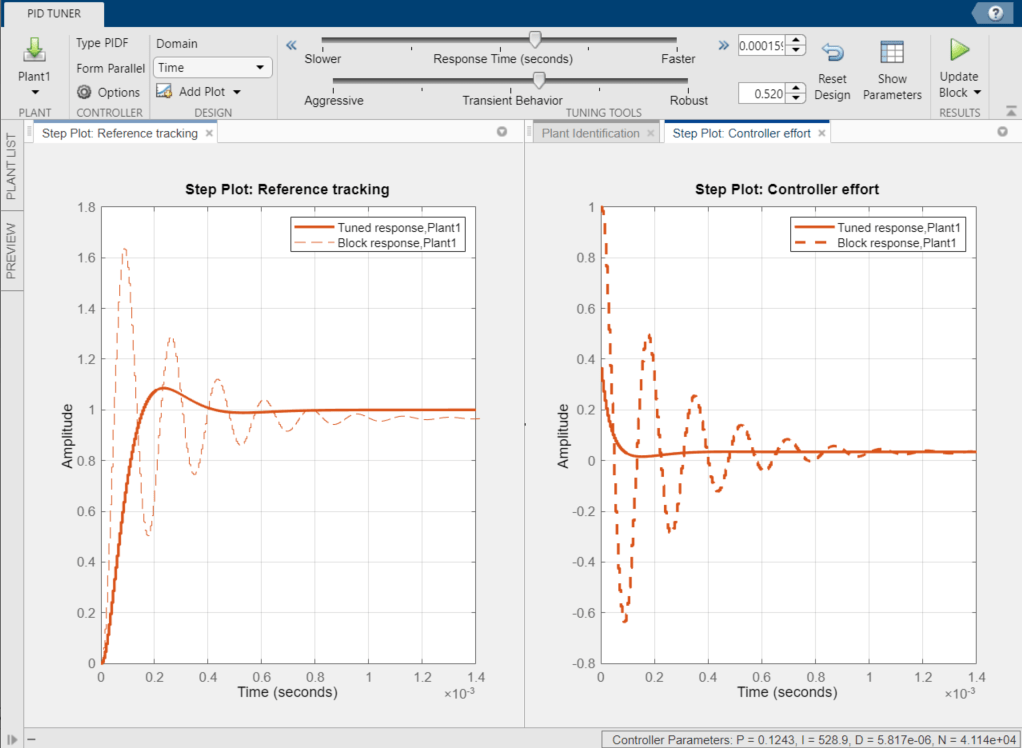
PID调谐器自动调优PID控制器的确定的植物。调优后的控制器响应约有5%的超调,稳定时间约为0.0006秒。单击参考跟踪步进绘图使其成为当前图形。

控制器输出是PWM系统的占空比,必须限制在[0.01 0.95]。为了确认控制器输出满足这些边界,创建一个控制器努力图。在PID调谐器选项卡,添加图下拉列表,在一步,点击控制器工作.移动新创建的控制器工作情节到第二情节组。

在控制器工作图中,调整后的响应(实线)显示在模拟开始时需要大量的控制工作。要达到约0.0004秒的沉降时间和9%的超调,调整响应时间而且瞬态行为滑块。这些调整将最大控制努力减少到可接受的范围。
若要用调优的控制器值更新Si万博1manbetxmulink块,请单击更新块.
为了确认PID控制器的性能,需要对Simulink模型进行仿真。万博1manbetx
bdclose (“scdbuckconverter”)
另请参阅
相关的话题
您也可以从以下列表中选择网站: