实时PID自动调谐
在一个独立的应用程序使用PID自动调谐算法实时调整对你的身体,你必须部署PID autotuner块到您自己的系统。为此,您将创建一个模型万博1manbetx®模型部署。您可以配置此模型与实验和调优参数。或者,您可以配置参数这样的供应系统外部从其他地方。一旦部署到自己的系统,自动调谐模式注入信号到你的工厂和接收工厂反应,不使用仿真软件来控制优化过程。万博1manbetx部署PID自动调谐算法需要一个代码生成等产品万博1manbetx仿真软件编码器™。
作为一种替代方法,您可以调整实时对物理设施在使用仿真软件来控制实验。万博1manbetx有关更多信息,请参见实时控制模型的PID自动调谐万博1manbetx。
工作流
在概述,工作流部署实时调整PID自动调谐算法:
创建一个模型模型万博1manbetx部署一个PID自动调谐块到您的系统。
配置启动/停止信号优化实验开始和结束时控制。在部署后,您可以使用这个信号在任何时候启动PID自动调谐过程。
指定控制器参数如控制器类型和目标优化的带宽。
配置实验参数如扰动的振幅中注入频率特性实验。
将模式部署到您的系统启动自动调谐的过程对你的身体。你可以验证闭环实时性能。
实时调整,在实践中,您可能想要在运行时指定一些参数,如目标带宽或扰动振幅。部署应用程序指定参数信息,明白了在部署后访问自动调谐参数。
步骤1。创建可部署仿真软件模型与PID自动调万博1manbetx谐块
使用实时调整PID自动调谐块需要创建一个部署仿真软件模型。万博1manbetx有几种方法可以这样做。
可部署的模块和自动调谐
最基本的形式,一个模型用于部署实时PID自动调谐与下图相似,使用闭环PID自动调谐或者是开环PID自动调谐块。这种方法的一个优势是,它可以让你切换和调优在运行时不同的PID控制器。
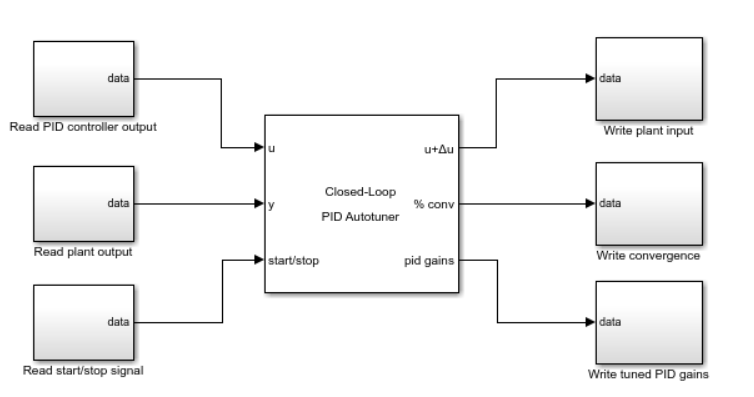
这里,块连接到输入和输出的PID自动调谐块代表硬件接口读写系统实时数据。例如,读PID控制器输出块可以为接收串行数据接口,aUDP接收块接收UDP数据包,或者通过无线网络接收其他信号的接口。同样的块写入数据,如写植物输入可以为串行接口,UDP或其他硬件接口编写数据。
自动调谐块的默认端口是:
u——接收控制信号。y——接收装置的输出。启动/停止——接收信号,开始和结束的优化过程。u +Δu——饲料植物输入输出信号。实验没有运行时,u +Δu输出控制信号作为输入u。当实验运行块和注入测试信号u +Δu。开环调优,块之间的循环u和u +Δu实验的持续时间。当实验结束时,块恢复之间的关系u和u +Δu。% conv——输出频率特性的进度估计的数字指标的实验。pid增益——输出调整PID收益当调优过程停止。
在这个配置中,PID控制器本身存在于另一个模块的系统。调整完成后,您可以使用您自己的逻辑来写的PID调整收益pid增益端口自动调谐块的PID控制器。
可部署的模块和控制器
或者,您可以部署一个模块,包括PID控制器和PID自动调谐算法,例如下图所示。这种方法的一个优势是,它促进了重调一个特定的控制器在一个单独的系统。
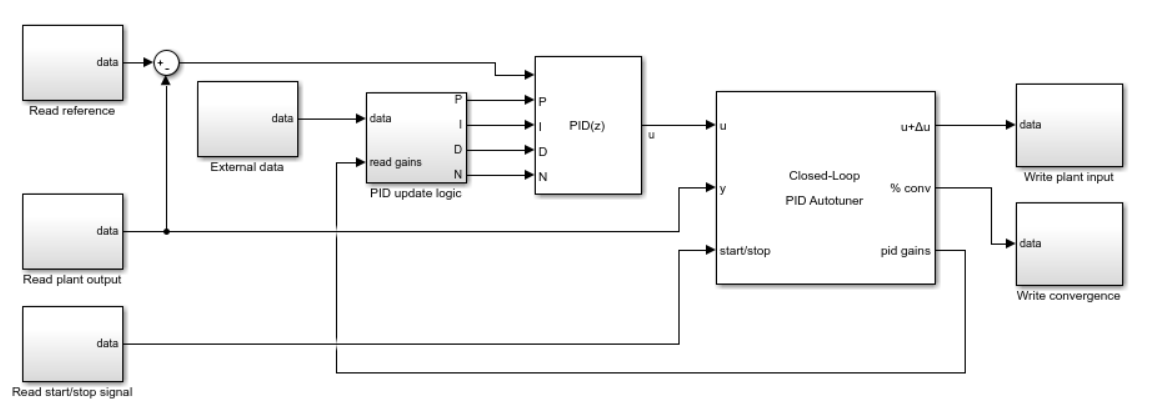
在本示例中,PID控制器作为仿真软件实现万博1manbetxPID控制器块。因为块的PID增益可调,您可以配置您的系统编写调整收益已部署的控制器。或者,您也可以使用自己的自定义部署的PID控制器子系统模型。
您可以实现任何逻辑适合您的应用程序来决定是否和如何更新的PID控制器优化收益。说明系统的PID更新逻辑子系统是这样的一个模块。的外部数据块代表其他信息你的逻辑来确定是否需要更新控制器。
请注意
当你使用闭环PID自动调谐块,喂pid增益直接输出到PID控制器增益的输入可以引入一个代数循环,防止代码生成。为了避免这个问题,你可以介绍一个状态PID更新逻辑代数循环。例如,您可以试试下列方法之一:
使用一个
单位延迟块保持控制器输出一个时间步的控制器的输入。使用一个数据存储内存块,见实时调整PID控制器使用闭环PID自动调谐块。
无扰转移开环调优
当你使用开环PID自动调谐,如果控制器包括积分器行动,考虑实现信号跟踪,避免积分器终结在优化实验。信号跟踪使得PID控制器继续跟踪真正的植物输入时的循环。没有它,你的系统控制回路时可以体验凹凸调优过程结束时关闭。
如果你的PID控制器模型万博1manbetxPID控制器块中,您可以使用启用跟踪模式控制器的参数块为了避免这种肿块。下图展示了一个包含一个模块开环PID自动调谐块和一个PID控制器块与跟踪模式配置。植物源输入控制器的跟踪输入块。
![]()
步骤2。配置启动/停止信号
启动和停止自动调谐过程中,使用的信号启动/停止端口。实验没有运行时,阻止传递信号不变u来u +Δu。在这种状态下,阻止对植物或控制器的行为没有影响。
频率特性估计实验开始和结束与一个上升或下降信号启动/停止端口,分别。因此,在部署后,开始自动调谐过程中,使用一个崛起的信号启动/停止端口。在适当的时候,或者之后% conv信号解决近100,使用信号结束实验。当实验结束时,该算法生成调整PID的收益和回报他们pid增益端口。一个保守的估计的实验时间是200 /ωc闭环优化或100 /ωc开环优化,ωc你的目标是带宽。有关如何配置起止的更多详细信息信号,看到闭环PID自动调谐或开环PID自动调谐块引用页面。
步骤3。设定PID调优参数
指定系统PID控制器的配置,使用自动调谐块的以下参数:
类型
形式
时间域
控制器采样时间(秒)
积分器的方法
过滤方法
为闭环PID自动调谐之外,您还可以指定一个样本时间不同的调优控制器采样时间(秒)。PID增益调优算法计算量,当您想要部署块硬件和优化控制器快速样品时间,一些硬件可能不完整的PID增益计算在一个时间步。吞吐量降低硬件要求,使曲子在不同样品的时间参数,然后指定一个调优示例时间低于控制器样品时间使用调优示例时间(秒)参数。
然后,指定目标带宽和相位调整的幅度目标带宽(rad /秒)和目标阶段保证金(度)参数,分别。
中指定的目标带宽,rad /秒,是目标的值0分贝增益交叉频率调谐的开环反应CP,在那里P是植物响应,C是控制器的响应。这种交叉频率大约设置控制带宽。对于一个上升τ秒,一个好的目标带宽2 /猜τrad /秒。
目标阶段保证金设置调谐系统的鲁棒性。一般来说,选择一个值的范围大约45°- 60°。一般来说,更高的利润率改善过度阶段,但可以限制响应速度。默认值,60°,平衡性能和鲁棒性,产生过度约5 - 10%,根据植物的特点。
你最可以设置调优参数在您自己的应用程序部署,而不是固定在PID自动调谐块之前部署。看到在部署后访问自动调谐参数。
步骤4。设置实验参数
周围的频率特性实验中注入正弦信号频率估计目标带宽ωc:
(1/3,1、3、10)ωc为开环PID自动调谐块
(1/10,1/3,1、3、10]ωc为闭环PID自动调谐块
使用正弦振幅块的参数来指定这些信号的振幅。
如果你的工厂是渐近稳定的开环PID自动调谐块可以估计植物直流增益摄动一步。指定这个扰动的振幅一步振幅参数。如果你的植物有一个积分器,清除估计信号直流增益与步骤参数。
谨慎
不要使用闭环或开环PID自动调谐与一个不稳定的植物。
不要使用开环PID自动调谐的植物有不止一个积分器。您可以使用闭环PID自动调谐multiple-integrator植物。
所有的扰动振幅必须:
足够大的扰动克服任何死区上方的植物致动器和生成响应噪声水平。
足够小,保证工厂在名义操作点附近的近似的线性区域,避免饱和植物输入或输出。
第5步。优化和验证
自动调谐模块部署到您的系统后,使用一个上升启动/停止信号开始自动调谐过程。部署模块测试信号注入你的身体的植物。在适当的时候,或当% conv信号稳定在100%附近,使用一个下降启动/停止信号结束实验。一个保守的估计的实验时间是200 /ωc闭环优化或100 /ωc开环优化,ωcc是你的目标带宽。实验停止时,模块计算新的PID收益基于估计的频率响应在指定的系统和你的调优目标。你可以检查调整PID获得使用pid增益信号。
当你检查这些收益和转移到您的控制器,注意这些收益的含义在PID自动调谐块。在离散时间块假设以下PID控制器传递函数:
在平行的形式,或理想的形式,
F我(z),Fd(z)取决于您所指定的值积分器的方法和过滤方法公式,分别。更多细节,请参阅闭环PID自动调谐或开环PID自动调谐块引用页面。
之后你将调整收益PID控制器,你可以观察和验证系统的持续性能与新收益。
在部署后访问自动调谐参数
的一些参数设置来配置自动调谐是可调的,这样你可以在生成的代码中访问它们。不是可调的参数,您必须配置在部署前的块。
可调参数
以下参数的PID自动调谐块在部署后可调。关于所有这些参数的更多信息,请参阅闭环PID自动调谐或开环PID自动调谐块引用页面。
| 参数 | 描述 |
|---|---|
| 目标带宽(rad /秒) | 目标交叉频率的开环反应 |
| 目标阶段保证金(度) | 目标最小相位裕度的开环反应 |
| 正弦振幅 | 正弦扰动幅度 |
| 估计信号直流增益与步骤 | 注入信号进入工厂 |
| 一步振幅 | 振幅扰动步 |
| 类型 | PID控制器类型(如π,PD,或PID) |
| 形式 | PID控制器形式 |
| 积分器的方法 | 离散积分公式集成器 |
| 过滤方法 | 离散集成导数公式筛选条款 |
Non-Tunable参数
以下参数的PID自动调谐块并不在部署后可调。您必须指定在块代码生成之前,和它们的值在应用程序中保持不变。关于所有这些参数的更多信息,请参阅闭环PID自动调谐或开环PID自动调谐块引用页面。
| 参数 | 描述 |
|---|---|
| 时间域 | PID控制器时间域 |
| 控制器采样时间(秒) | 样本的PID控制器(见在部署后修改样品时间) |
| 减少内存和避免任务泛滥(外模式) | 只部署优化算法 |
| 数据类型 | 浮点精度 |
在部署后修改样品时间
的控制器采样时间(秒)参数可调。因此,你不能直接访问它生成的代码,当你部署。改变控制器在运行时部署块样品时间:
集控制器采样时间(秒)为1。
把自动调谐块触发子系统。
触发子系统所需的样本。