调优自定义屏蔽子系统
这个例子展示了如何启用自定义屏蔽子系统控制系统设计者.配置后,您可以以与Simulink®Control Design™中任何受支持的块相同的方式调优自定义屏蔽子系统。万博1manbetx万博1manbetx有关更多信息,请参见哪些块是可调的?.
超前滞后库块
类中的Lead-Lag Controller块进行调优scdexblks图书馆。
open_system (“scdexblks”)

这个块实现了一个补偿器,它有一个零、一个极点和一个增益。在配置控制器时,可以指定以下块参数。
获得( )
零频率( )
极点频率( )
超前滞后控制器块实现了以下传递函数。
为控制系统设计器配置分系统
配置用于调优的屏蔽子系统控制系统设计者,指定一个配置函数。在本例中,块使用scdleadexample.m.要打开此文件,请在MATLAB®命令行中键入编辑scdleadexample.
该函数返回具有以下字段的结构。
TunableParameters-结构数组,每个可调参数(增益,零,极)一个元素EvalFcn-将块参数转换为零极增益形式的函数句柄InvFcn-给定零极增益值计算块参数的函数句柄约束-在块上指定约束的结构,例如极点和零的数量轮廓尺寸—控制器输入端口号外港—控制器输出端口号
的scdleadexample配置功能为控制器块指定如下约束。
只允许有一根杆子(
MaxPoles约束)只允许有一个零(
MaxZeros约束)增益可调(
isStaticGainTunable约束)
若要使用配置函数,请将其指定为SCDConfigfcn块的回调函数。为此,右键单击Lead-Lag Controller块并选择属性.然后,在“块属性”对话框中,在回调选项卡,设置SCDConfigFcn来scdleadexample.

或者,您可以设置SCDConfigFcn使用set_param函数。
set_param (blockpath“SCDConfigFcn”,“scdleadexample”)
一旦你设置了块配置功能,你可以调优控制器使用控制系统设计者.
速度控制系统
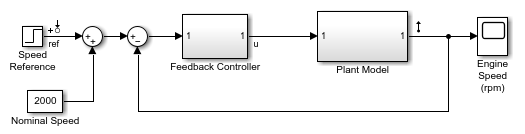
的scdspeedctrlleadlag模型使用超前滞后控制器块调整反馈回路单回路反馈/预滤波补偿器设计.
open_system (“scdspeedctrlleadlag”)
打开控制系统设计者,在Simulin万博1manbetxk模型窗口中,在应用程序选项卡,在应用程序画廊,点击控制系统设计者.

在“编辑体系结构”对话框中,在块选项卡上,单击添加模块.然后,在“选择要调优的块”对话框中单击反馈控制器,并选择领先-落后控制器.
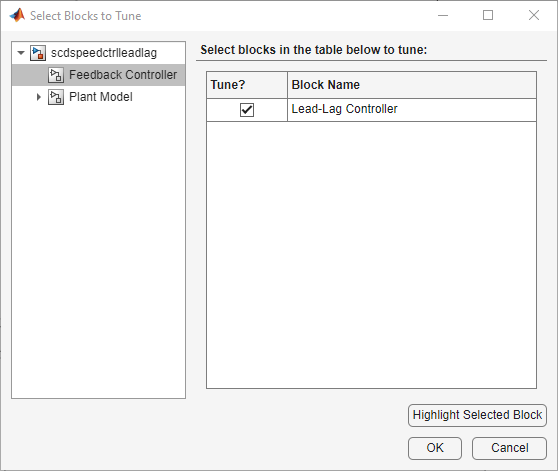
点击好吧.
在编辑架构对话框中的信号选项卡中,在Simulink模型中定义的分析点将自动添加为万博1manbetx位置.
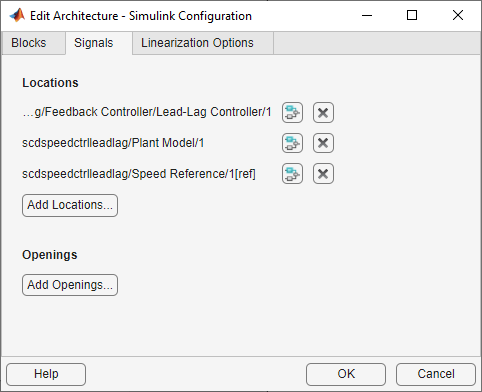
在线性化选项选项卡,在操作点下拉列表,选择模型初始条件.

点击好吧.
在调优控制器时,创建新的图来查看步骤响应。在控制系统设计者中,选择新剧情>新步骤.
在“新建步骤”对话框中,单击选择对图的响应下拉菜单,选择新的输入输出转移响应.如下图所示配置响应。

如需查看响应,请单击情节.
调整补偿器
的控制系统设计者App包含四种方法来调优控制系统。
的参数进行手动调优
领先-落后控制器使用补偿器编辑器。有关更多信息,请参见使用补偿器万博1manbetx编辑器优化Simulink块.

使用开环/闭环博德,根轨迹或尼克尔斯编辑器图图形化地调整补偿器极点,零点和增益。点击调优方法,并选择下的编辑器图形化优化.
使用时域和频域设计要求优化补偿器参数(需要Simulink design Optimization™软件)。万博1manbetx点击调优方法,并选择基于优化的调优.有关更多信息,请参见在单回路控制器设计上实施时间和频率要求(万博1manbetxSimulink设计优化).
使用基于闭环时间常数等参数的自动调优计算初始补偿器参数。点击调优方法,并选择PID调优,IMC调优,循环形成(需要鲁棒控制工具箱™软件),或者LQG设计.
完整的设计
本设计要求为参考阶跃响应中的单回路反馈/预滤波补偿器设计可以满足以下超前滞后控制器块参数。
获得= 0.0075426
零频率(rad/s) = 2
极点频率(rad/s) = 103.59
下图显示了这些控制器参数的闭环系统响应。

更新Simul万博1manbetxink模型
若要将补偿器参数写回Simulink模型,请单击万博1manbetx更新模块.然后您可以在非线性模型上测试您的设计。
bdclose (“scdexblks”) bdclose (“scdspeedctrlleadlag”)
另请参阅
相关的话题
您也可以从以下列表中选择一个网站: