이번역페이지는최신내용을담고있지않습니다。최신내용을문으로보려면여기를클릭하십시오。
포,트클라우드처리
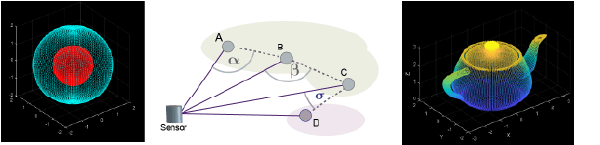
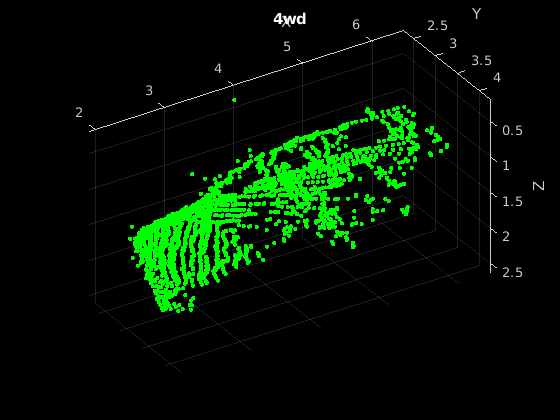
포트클라우드는3차원공간에속한데이터점들의집합입니다。이러한점들이합쳐져3차원형상이나객체를차원형상이나객체를현합니다。데이터집합의각점은x, y, z기하좌@로@현됩니다。포인트클라우드는많은수의개개의공간적측정값을설명가능한객체로표현할수있는데이터셋으로조합하는수단을제공합니다。포인트클라우드처리는로봇주행과인식,깊이추정,스테레오비,전시각적정합,첨단운전자보조시스템(ADAS)에사용됩니다。计算机视觉工具箱™알고리즘은다운샘플링,잡음제거및포인트클라우드변환을위한포인트클라우드처리기능을제공합니다。또한,포인트클라우드정합을수행하고,기하학적형상을3차원포인트클라우드에피팅하고,포인트클라우드를읽기,쓰기,저장,표시,비교하는기능을제공합니다。뿐만아니라여러포트클라우드를결합하여하나의3차원장면을복원할수도있습니다。
pcregistericp,pcregisterndt,pcregistercorr및pcregistercpd를사용하여이동포트클라우드를고정포트클라우드에정합시킬수있습니다。이러한정합알고리즘은각각ICP(迭代最近点)알고리즘,无损检测(正态分布变换)알고리즘,위상상관알고리즘,CPD(相干点漂移)알고리즘을기반으로합니다。정합된포인트클라우드로맵을작성하고,루프폐쇄를검출하고,맵을드리프트보정에최적화하고,사전작성된맵에서위치추정을수행할수있습니다。자세한내용은在MATLAB中实现点云SLAM항목을참조하십시오。
함수
도움말항목
- 选择基于传感器数据的SLAM工作流
选择正确的同步本地化和映射(SLAM)工作流,并查找主题、示例和支持的特性。万博1manbetx
- 在MATLAB中实现点云SLAM
了解点云配准和映射工作流程。
- PLY格式
斯坦福三角模式
- 开始使用深度学习的点云
了解如何使用点云进行深度学习。
- 选择函数来可视化检测到的对象
比较可视化功能。
- 标记,分割和检测(激光雷达工具箱)
使用深度学习和几何算法对点云数据中的对象进行标记、分割、检测和跟踪
추천 예제






您也可以从以下列表中选择网站: