自动驾驶的应用
对于自动驾驶的设计和仿真模型预测控制器
您可以使用自动驾驶的应用模型预测控制(MPC),以提高车辆的响应速度,同时保持乘客的舒适性和安全性。MPC有几个特点是自动驾驶的有用的,比如在不久的将来预测车辆的行为,并明确在优化过程中处理的约束。欲了解更多信息,请参阅自动驾驶的使用模型预测控制。
块
主题
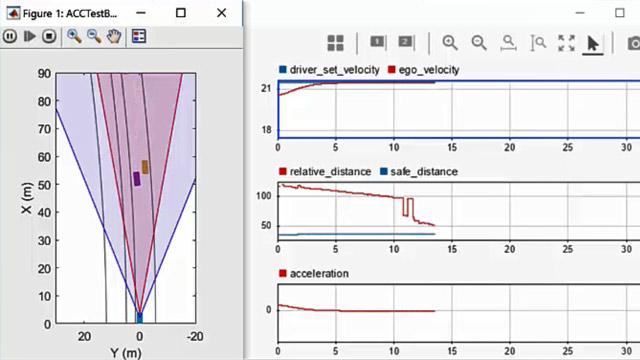
自适应巡航控制
设计一个MPC控制器的轨道的一组速度并通过调节自主车辆的纵向加速度维护从领先车辆的安全距离。
设计通过数据从视觉和雷达传感器检测相结合在其环境中铅的车辆自适应巡航控制系统。
车道保持辅助
设计MPC控制器,通过调节前转向角保持沿着直的或弯曲道路的中心的自主车辆行驶。
设计一个基于MPC-车道保持辅助系统,采用车道检测和道路曲率从自动驾驶工具箱™预览。
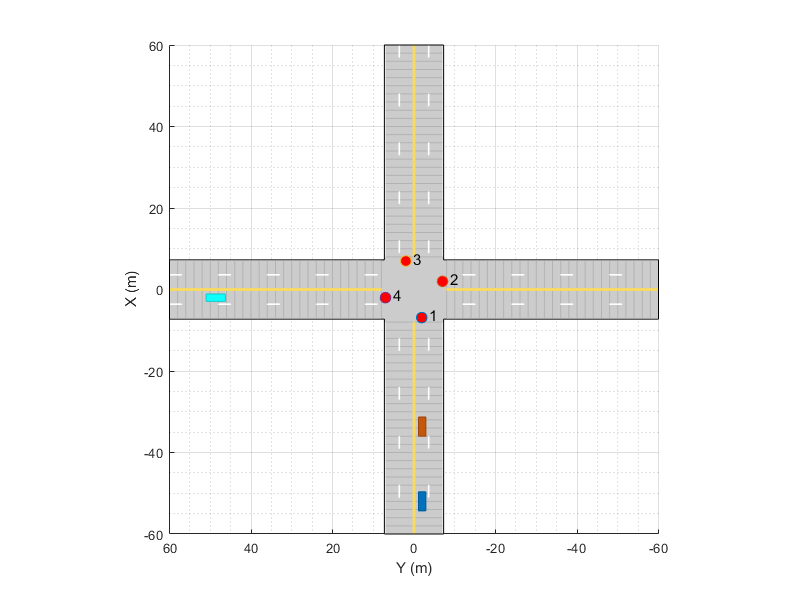
车道追踪
设计采用非线性MPC与道路曲率预览下面的车道控制器。
设计一个MPC-based lane-following系统使用车道检测和道路曲率自动驾驶工具箱的预览。
设计一个基于mpc的车道跟踪系统,使用一个使用虚幻引擎模拟的摄像机系统来检测车道和车辆®。
针对多种测试场景下高速公路车道控制器的自动测试。
下面包含适应基于邻近车辆的轨迹智能目标车辆应用模拟车道。
停车处
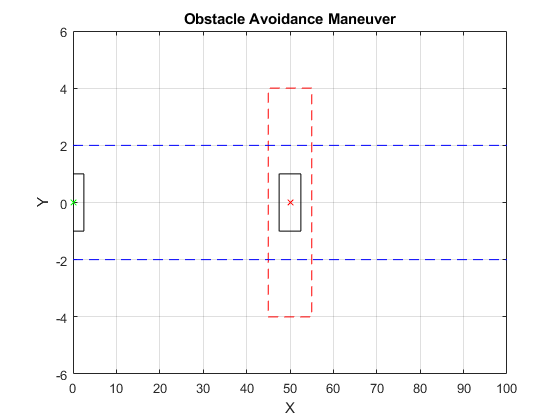
设计的控制器可以使用非线性模型预测控制停车库代客。
设计采用非线性模型预测控制平行泊车控制器。
自动平行停车车辆产生路径使用RRT星规划和跟踪轨迹使用非线性模型预测控制。
精选示例

您还可以选择从下面的列表中的网站: