传感器融合和跟踪工具箱
다중센서위치추적시스템을설계,시뮬레이션,테스트할수있습니다
传感器融合和跟踪工具箱™는여러개의센서에서나오는데이터를융합하여상황인식과위치추정을유지하는시스템을설계,시뮬레이션및테스트하는알고리즘을제공합니다。참조예제는공중,우주,지상,선상,수중시스템과같은감시및자율시스템의다중객체추적및센서융합개발의시작점을제공합니다。
능동/수동레이더,소나,라이다,EO / IR,IMU,GPS등실제센서의데이터를융합할수있습니다。또한,가상센서에서합성데이터를생성하여다양한시나리오에서알고리즘을테스트할수도있습니다。이툴박스에는그리드수준,탐지수준,그리고객체또는추적수준융합을조합하는아키텍처를평가할수있는다중객체추적기및추정필터가포함되어있습니다。또한지상실측장면과비교하여성능을검증하는OSPA,GOSPA등의메트릭도제공합니다。
시뮬레이션가속화또는신속프로토타이핑을위해C코드생성을지원합니다。
시작하기:

免费白皮书
自主系统的传感器融合与跟踪
공역감시
레이더,ADS-B,EO / IR센서등능동센서와수동센서의데이터를이용하여여러개의객체를추적할수있습니다。추적기를사용자지정하여기동객체를처리할수있습니다。

지상중심시나리오를이용한항공기추적
우주감시
레이더센서의데이터를사용하여우주상황인식을생성하여여러개의우주객체를추적할수있습니다。케플러운동모델또는기타궤도모델을사용하도록추적기를구성할수있습니다。

케플러운동모델을사용한우주쓰레기추적
단일센서추적
다중객체추적기를모델링하고시뮬레이션하여스마트센서에필요한처리를수행할수있습니다。이러한처리는원시데이터를객체추적목록으로변환하는절차도포함합니다。
중앙집중형융합
여러센서와센서모달리티의데이터를융합하는중앙집중형추적기를이용하여확장객체를추적할수있습니다。확률가설밀도(博士)추적기를이용하여,객체의치수,방향,움직이는객체의운동학및객체의크기및방향을추정할수있습니다。복잡한도심환경에대해RFS(무작위유한집합)그리드기반추적기를구현하여그리드셀의운동학뿐만아니라점유여부를추적할수있습니다。
트랙수준융합
다수의추적원에서나온트랙을융합하여환경에대한더욱종합적인추정결과를제공할수있습니다。대역폭제약조건을갖는시스템과루머제어를이용하여불필요한결과를제거하는시스템의트랙간융합아키텍처를평가할수있습니다。
추정필터및데이터연결
선형,비선형칼만필터,다중모델필터,입자필터등풍부한추정필터라이브러리를이용하여객체상태를추정할수있습니다。2차원할당문제또는瓣할당문제에대한최적해또는k개최적해를구할수있습니다。탐지결과를탐지결과로,탐지결과를트랙으로,트랙을트랙으로할당할수있습니다。
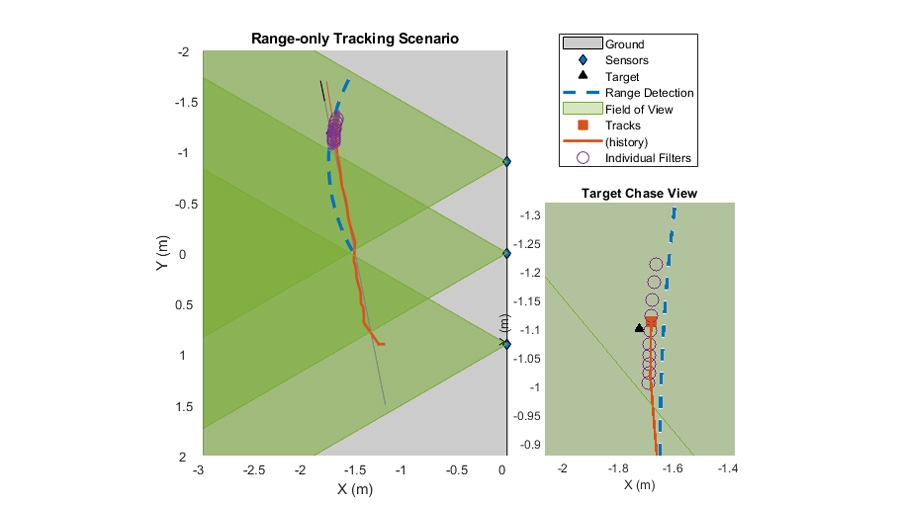
비가우스필터를이용한거리전용추적
다중객체추적기
추정필터,할당알고리즘,트랙관리로직을다중객체추적기에통합하여탐지결과를트랙으로융합할수있습니다。센서데이터를탐지결과형식으로변환하고간단한시나리오에GNN(전역최근접이웃)추적기를이용할수있습니다。측정모호성이존재하는조밀간격목표물추적과같은어려운시나리오를위해,간편하게JPDA(결합확률데이터연관)추적기,MHT(다중가설추적기),또는PHD추적기로전환할수있습니다。
확장객체및그리드기반추적기
PHD추적기를사용하여확장객체의운동학,크기,방향을추적할수있습니다。라이다및레이더포인트클라우드등의고해상도센서데이터를사용하여그리드기반RFS추적기로추적하여복잡한도심환경에서그리드셀의동적특성을추정할수있습니다。
트랙수준융합
추적센서또는기타트랙간융합객체에의해생성된트랙을융합할수있습니다。대역폭제약시스템에서분산추적시스템을설계할수있습니다。루머확산을줄여불필요한추적기결과를제거할수있습니다。
융합아키텍처
추적기아키텍처를탐색하고트랙간융합,중앙수준추적또는하이브리드추적아키텍처사이의설계상장단점을평가할수있습니다。红外光谱、ESM또는바이스태틱레이더등각도전용,거리전용센서에서나온탐지결과를정적(탐지결과)융합을이용하여조합할수있습니다。

분산동기화수동센서를이용한추적。
객체궤적및자세생성
跟踪方案设计앱으로대화형으로시나리오를정의하고,다양한참조프레임안에서객체의실제위치,속도,방향을정의하고변환하는MATLAB스트립트를생성할수있습니다。

능동및수동센서모델
레이더,소나,라이다등능동센서를모델링하여객체탐지결과를생성할수있습니다。방위각,고도각또는둘다에대한기계적스캔또는전자적스캔을시뮬레이션할수있습니다。RWR(레이더경고수신기),ESM(전자적지원장비),수동소나,적외선센서를모델링하여추적시나리오에활용할수있는각도전용탐지결과를생성할수있습니다。에미터와센서를이용하여멀티스태틱레이더와소나시스템을모델링할수있습니다。
몬테카를로시뮬레이션
다양한랜덤잡음값을이용하여몬테카를로시뮬레이션을수행할수있습니다。지상실측자료와센서구성을변경하여테스트견고성을높일수있습니다。
INS센서모델
IMU(관성측정장치),GPS,고도계,INS센서를모델링할수있습니다。모델의온도,잡음속성등의환경적파라미터를조정하여실제환경을모방할수있습니다。

관성융합알고리즘테스트를위한IMU및GPS센서모델링。
방향추정
가속도계와자력계측정값을융합하여전자나침반(eCompass)을시뮬레이션할수있습니다。가속도계자,이로스코프,자력계측정값을明显(자세방위기준장치)필터와융합하여방향을추정할수있습니다。
자세추정
관성센서및GPS를사용하여비홀로노믹방향제약조건의유무와관계없이자세를추정할수있습니다。관성센서와고도계또는시각적주행거리측정을융합하여GPS없이자세를파악할수있습니다。

융합된IMU및카메라데이터를이용한시각적관성주행거리측정
시나리오시각화
객체,지상실측궤적,센서측정값,트랙의방향과속도를3차원으로플로팅할수있습니다。탐지결과와트랙불확실성을플로팅할수있습니다。트랙ID와내역을시각화할수있습니다。

멀티플랫폼시나리오의시어터플롯。
센서및추적메트릭
트랙길,이트랙단절,트랙ID교환등트랙의수립,유지,삭제메트릭을생성할수있습니다。위치,속도,가속도,요각(偏航率),RMSE(제곱평균제곱근오차),또는一(평균정규화추정오차제곱)로트랙정확도를추정할수있습니다。통합OSPA, GOSPA메트릭을사용하여성능을단일점수로요약할수있습니다。艾伦분산을사용하여관성센서잡음을분석할수있습니다。
필터및추적기조정
할당임계값,필터초기화함수,확정및삭제임계값등다중객체추적기의파라미터를조정하여성능을극대화할수있습니다。여러추적기및추적기구성에대한결과를비교할있습니다。자동으로INS필터를조정하여잡음파라미터를최적화할수있습니다。
코드생성
Matlab编码器™를사용하여시뮬레이션가속화또는데스크톱프로토타이핑을위한C / c++및墨西哥人코드를생성할수있습니다。비용계산임계값을적용하여할당비용계산에소모하는시간을줄일수있습니다。
