无人机的工具箱
无人机응용모델설계시,뮬레이션및배포
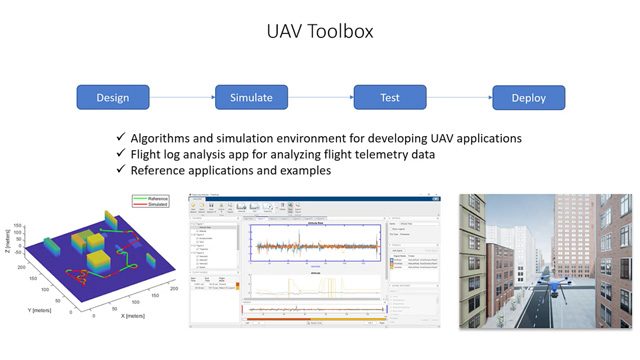
无人机工具箱는무인항공기(UAV)및드론응용모델을설계,시뮬레이션,테스트및배포할수있는툴과참조응용모델을제공합니다。이를통해자율비행알고리즘,无人机임무및비행제어기를설계할수있습니다。飞行Log Analyzer앱을통해널리쓰이는비행로그형식으로부터3차원비행경로,원격측정정보및센서판독값을대화형방식으로분석할수있습니다。
자율비행알고리즘및비행제어기의데스크탑시뮬레이션및边境(半)테스트를수행하는경우에는无人机시나리오를생성하여시뮬레이션할수있습니다。3차매우현실적인원환경또는2.5차원시뮬레이션환경에서카메라,라이다,IMU및GPS센서출력값을시뮬레이션할수도있습니다。
无人机工具箱는멀티로터无人机를활용한자율드론소포배달등널리쓰이는无人机사용에대한참조응용예제를제공합니다。툴박스는신속프로토타이핑,边境테스트및Pixhawk®自动驾驶仪(嵌入式编码器®사용)과같은하드웨어에대한독립형배포를위해C / c++코드생성을지원합니다。
시작하기:

센서판독값을사용한无人机소포배달시뮬레이션
입방체无人机시뮬레이션
입방체기반시뮬레이션을위한无人机시나리오를작성하고자율비행알고리즘을테스트하는동시에GPS, INS및라이다센서에서제공되는판독값을시뮬레이션할수있습니다。
虚幻引擎无人机시뮬레이션
史诗般的游戏®의虚幻引擎®을사용하여제작된3차원시뮬레이션환경에서无人机자율비행알고리즘을개발,테스트및시각화하는동시에고충실도카메라및라이다센서데이터를생성할수있습니다。
飞行Log Analyzer앱
TLOG, ULOG및사용자지정파일형식의로그파일을가져온,후대화형방식으로가져온데이터를사용자지정가능플롯으로시각화하고분석할수있습니다。

원격측정로그데이터에서생성된플롯。

指导模型블록을사용해고정익또는멀티로터无人机를축소차수유도모델로표현。
无人机임무
경로점추종,궤도추종및사용자지정가능경로계획알고리즘을사용하여자율无人机임무를계획하고시뮬레이션할수있습니다。
MAVLink연결
微型飞行器链接(MAVLink)통신프로토콜을사용하여无人机하드웨어와연결해메시지를교환하고토픽,연결및클라이언트의목록를살펴볼수있습니다。

MAVLink프로토콜을사용한无人机하드웨어와의통신및无人机파라미터조정。
PX4蒙
无人机工具箱支持包的PX万博1manbetx4自动驾驶로PX4®호스트타겟에서시뮬레이션하는동안Pixhawk自动驾驶仪주변기기에액세스할수있습니다。嵌入式编码器를사용하여Pixhawk蒙에비행제어알고리즘을구축하고배포할수있습니다。

비행제어알고리즘설계및Pixhawk蒙에배포。