线性和非线性模型预测控制器
您希望使用MPC控制器控制系统,但您不确定哪种方法可用?然后继续看,因为我要给你一些食谱。我会从一些煎饼食谱开始。如果可以忍受我,您将看到与MPC的连接。这是配方。如果你有面粉,鸡蛋和牛奶,你可以制作煎饼。许多人以前尝试过这个食谱;这很简单,你不能出错。同样,如果您有一个由线性工厂模型表示的线性系统,并且您具有线性约束和二次成本函数,则可以使用线性时间不变的MPC来控制系统。具有这些很好的属性的MPC问题导致了成本函数具有单个全局最佳的凸优化问题,并且优化的目标是找到这种最佳状态。 This is a well-studied problem, and you can use many types of numerical methods and software to solve it.
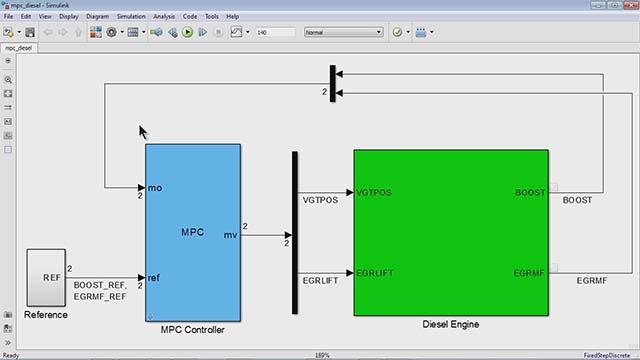
要回到我们的煎饼:如果是面粉,你有什么杏仁面粉。你还能做煎饼吗?是的你可以!同样,如果您正在处理的系统不是线性但非线性的,则可以使用线性MPC并仍然受益于凸优化问题的很好属性。在这种情况下使用的可用方法是自适应和增益预定的MPC控制器。这些控制器处理非线性系统的方式是基于线性化。例如,让我们看看这个非线性函数。我们可以在操作点线性化,这为我们提供了一种线性函数,其近似于在操作点附近的非线性系统。但是,在该地区之外,我们发现的线性函数将无法正常工作。因此,我们通常对找到多种线性化模型感兴趣,每个模型都表示非线性函数良好的操作点。 This is the regular MPC control diagram that we discussed previously which uses an internal plant model and an optimizer to compute the control action. In adaptive MPC, a linear model is computed on the fly as the operating conditions change. And at each time step, you update the internal plant model used by the MPC controller with this linear model. Note that in adaptive MPC, the structure of the optimization problem remains the same across different operating points. This means that the number of states, and number of constraints don’t change for different operating conditions over the prediction horizon. However, if they do change, then you should use gain-scheduled MPC. In gain-scheduled MPC, you linearize offline at the operating points of interest and for each operating point, you design a linear MPC controller. Each controller is independent from each other and therefore may have a different number of states, and different number of constraints. Note that in this approach you also need to design an algorithm that will switch between the predefined MPC controllers for different operating conditions. Although having independent controllers is an advantage of gain-scheduled MPC, it uses more memory than adaptive MPC. Therefore, the recommendation is to use adaptive MPC if a linear plant model can be found at run-time and the structure of the optimization problem remains fixed across different operating conditions. And if they change, then you can use gain-scheduled MPC, where you can design independent MPC controllers for the changing operating conditions.
现在回到煎饼。说你没有常规成分,你通常会烘烤,但非常独特的成分,你甚至没有熟悉。用这些成分制作煎饼将是真的挑战,但一旦你弄明白,他们将成为有史以来最好的品尝煎饼。如果您有一个非线性系统,不能通过线性模型近似,则可以使用非线性MPC。这种方法是最强大的一种,因为它使用植物最准确的表示,即非线性植物模型。因此,由控制器的预测更准确,这也导致更好的控制动作。但是,它也是最具挑战性的,可以实时解决,因为当您具有非线性约束和非线性成本函数时,优化问题变为非耦合。成本函数可能具有多个本地最佳ALOPA,并找到全局最佳可能性。解决需要大量计算的非透露优化问题的效率取决于您拥有的非线性求解器。
总之,如果您正在处理的工厂是非线性的,但可以用线性模型近似,您可以使用自适应和增益预定的MPC控制器。如果优化问题的结构在不同的操作条件下,则使用Adaptive MPC。但是,如果它确实如此,那么您可以使用增益预定的MPC。如果没有这些工作,因为您有一个高度非线性系统,不能通过线性化近似近似,那么您可以使用非线性MPC。
在下一个视频中,我们将讨论运行模型预测控制器的实现提示更快。