机器人技术的研发在过去几十年里取得了长足的进展,但并不一定像科幻小说作家想象的那样。现代研究着重于设计机器人,使其在对人类有害或乏味的情况下表现出色,例如执行灾难侦察或可靠地完成重复性任务,而不是让机器人主宰世界。尽管这些机器人已经被证明能够有效地完成体力劳动,但学会与人类进行自然互动仍然是一个挑战。
关于问题,来自Drexel University的机器人的新观点表现力和创造性的交互技术(Excite)中心与大学合作形成了跨学科合作功能织物中心(CFF)。这项努力提供了他们的内部机器人,霍博斯,在理解人类时具有独特的优势:服装。
虽然仍处于发展的早期发展,但远离时尚陈述,但衣服给豪博发了一种触感。该团队正致力于为哈博开发触摸敏感的服装,使其能够将某些东西与肩膀上的水龙头视为潜在的危险作为一种积极的推动。

Richard Vallett,Ryan Young,以及Youngmoo Kim博士在兴奋中心展示了Hubo。图像信用:Drexel大学。
在整个房间里的灵感
机器人技术和纺织技术的结合可能听起来违反直觉,但实验室的主要研究人员说,对他们来说,这种合作是再自然不过的了。
“一支球队正在研究机器人,而且只有20英尺远,另一个团队正在使用智能面料。然后一些创新的人问道,“如果我们把一些面料放在机器人上会发生什么?”“兴奋中心主任Youngmoo Kim博士说。“兴奋是关于有跨学科的空间,并且有很多不同类型的研究工作的机会。”
研究人员表示,这种合作正是该大学在设计ExCITe中心时所想的,该中心的研究人员探索从表达机器人(如Hubo)到创业游戏设计和电脑编织等一切事物。ExCITe中心的使命是“维持一个环境,鼓励偶然的知识和想法的交流”,这是对Hubo衣柜的恰当描述:合作开始于寻找Hubo的保护层,比目前的PVC外壳更不脆弱,更有保护作用。
“这些花哨的塑料贝壳会使它看起来非常未来派,但它们非常脆弱,并不能很好地保护机器人,”金说。
自2012年以来,CFF一直是Excite的一个组成部分,当时日本技术公司Shima Seiki向大学捐赠了16个工作站和三个电脑针织系统。这些计算机化的针织机将纱线逐行组装成纺织品行,类似于3D打印机层塑料方式。CFF的机器使用导电纱线来创造智能,柔性服装,无需额外的嵌入式电子设备。迄今为止,实验室使用该技术为储能和Wi-Fi电力收获的服装制造,甚至为预期监测收缩而无需额外组件的母亲的智能“腹部带”。但是,当它在哈博时,CFF的导演Geneviéve迪翁表示,两队都有一些障碍克服。

学生在兴奋中心工作。图像信用:Drexel大学。
湖泊穿着新针织的敏感衣服。图像信用:Drexel大学。
学习如何为成功服装
除了设计Hubo的衣服以防止碰撞和机械磨损,研究人员还努力设计一种面料,可以改善Hubo与人类的互动。在第一个任务中,团队将填充纺织品和高强度纱线结合起来,以对抗日常的磨损。结果是一套厚重的、配套的深灰色袖子、裤腿和衬衫。
迪翁说,这一成就不仅仅是为了他们的项目的功能,而且还非常重要,也很重要,也很重要,而且还可以了解整个智能纺织品。虽然我们可能会将纺织品视为一次性或脆弱,但哈博的盔甲是一种遗嘱,这些织物在这种情况下比工业强度塑料更耐用。
除了保护哈博之外,该团队还必须以电容式触摸传感器的形式设计触敏衣服。与计算机键盘一样,这些触摸传感器旨在感测触摸的压力和位置,并将其转换为机器的可用数据,例如移动光标或在何博如何回答问题时,“有人碰到我吗?“
“这些花哨的塑料外壳会让它看起来非常未来,但它们非常脆弱,不能很好地保护机器人。”
年轻人金
触敏服装
对于湖泊的新服装,传感器基本上是用导电纱线针织的电路,以充当布线和标准,非导电纱线,形成衣物的结构。该电路就像智能手机触摸屏一样:当一个人的皮肤按下裸露的导电纱线时,它会给机器人带来触摸感,测量触摸的位置和压力。
压力和位置可以告诉人们很多关于接触的信息:如果有人轻拍你的肩膀,他们想引起你的注意。从背后用力推搡传递出一个非常不同的、明显的信息。
虽然目标相当简单,但这一领域的新兴性质意味着该团队必须从头开始工作,以确定这些传感器将如何为机器人工作。很难将一个不灵活、复杂的电路设计转化为一个可以编织成灵活传感器的电路。与印刷电路包含许多层单独的电线不同,该团队的任务是想象一个使用尽可能少的层和电线的设计。Hubo的灵活性意味着,随着Hubo的移动,他的衣服和它们的电路都需要折叠和弯曲。这些限制导致了许多问题:线路如何集成到织物并连接到外部传感控制器?传感器的编织电路如何经受反复的弯曲和拉伸?传感器如何分辨由折叠或弯曲触发的外部触摸?传感器将如何处理诸如洗衣服等实际问题?
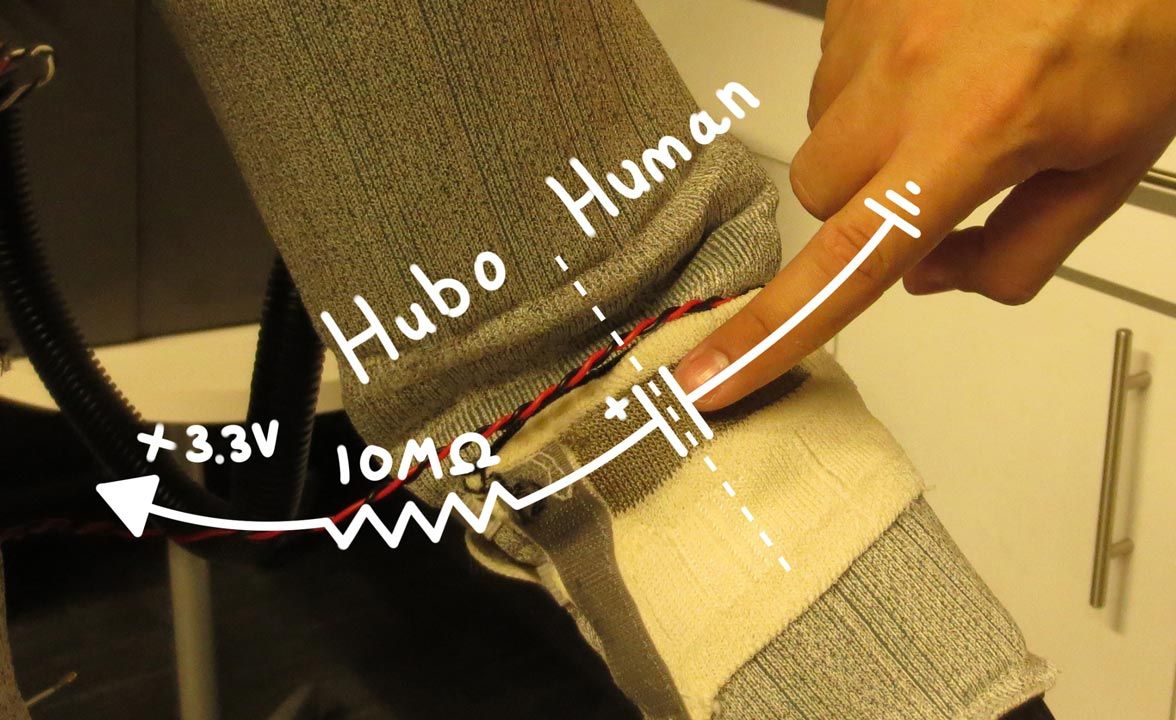
简单概述电路使用有利于触摸敏感的织物。图像信用:Drexel大学。
“我们希望传感器像纺织品一样处理,并且能够折叠,拉伸,并在没有降级或不利影响的情况下洗涤。”
Richard Vallett.
“我们希望传感器像纺织品一样处理,能够折叠、拉伸和洗涤而不降解或产生不良影响,”该项目的首席研究员、博士候选人理查德·瓦莱特(Richard Vallett)说。
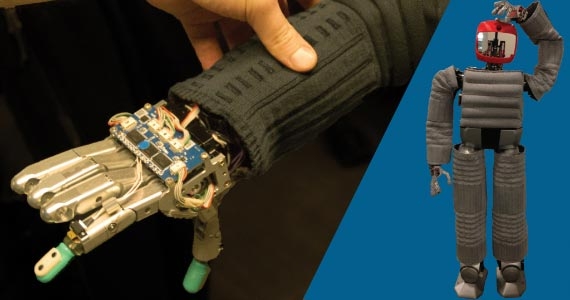
湖泊的触敏袖子和湖泊的全身防护服特写镜头。图像信用:Drexel大学。
感测,就像智能手机触摸板一样
设计人员选择自电容作为传感方法。自电容传感寄存器仅从导电的东西触摸,例如我们的指尖。大多数智能手机使用这种相同的方法,这就是为什么我们必须脱掉手套到文本。利用Hubo衣橱的自电容感测意味着传感器从折叠或拉伸的无意压力不会被注册为触摸。
为了探索这个新领域,该团队转向了MathWorks。Vallett说他们使用了Matlab®和模拟万博1manbetx®在柔性传感器中模拟触摸检测。随着传感器的电路变得更加复杂,它们使用Simscape™来模拟预期输出和性能,并减轻任何测量不确定性。
触摸传感器没有像传统电容传感器一样操作,该传感器依赖于许多电线的网格,具有低电阻以测量触摸位置。相反,传感器使用蛇形表面的蛇纹石的高电阻的单个导电纱线。通过纱线的低电流允许从纱线路径的两个端点测量电压的精细变化。然后将触摸从电压差分推断为沿着路径的线性距离。该团队能够通过改变传感器通过物理手段来调整电气行为。针织环的裸露导电纱线形式复杂电网。通过改变纱线组合物中的针织图案和单个纤维的数量,该团队可以最大化敏感性而不会失去性能。找到这两个因素的正确组合是关键。
“在进行任何物理测试之前,实验的参数通过Simulink模型,”Vallett说。万博1manbetx
可视化模型输出的能力使得团队设计了一组去耦方程,以跟踪从两个耦合电压信号测量的传感器上单一触摸的位置和压力。Since the virtual model allowed them to make sense of the virtual sensor’s nonstandard output and identify trends in the data, they were able to design and test a network of sensors that could detect accurate touch location using a single flexible wire and be certain that the folded and overlapping wire would not obscure the input location.
通过设计过程,团队也意识到他们的全部或无论是测量触摸位置的方法也可能需要修改。
“我们试图与我们的位置非常精确地感知攻丝和姿态,”迪翁说。“这真的很有趣,因为它不像我们没有想到它;我们只是试图追求最好的解决方案。“
该团队仍然致力于完善霍博的新DUDS,但他们希望提高面料的触控精度和敏感性,并扩展其超越实验室的技术,并帮助将这些机器人与他们旨在协助的社区集成。
“我们设想未来我们的机器人将成为真正的辅助设备,”Kim说。“如果你想让一个会倒垃圾或洗碗的机器人出现在你的家里,它需要以一种比我们现在能够做到的更自然的水平与人互动。各种形式的感知,尤其是触觉,在其中占了很大一部分。”
所以,当霍博斯穿着他的新衣服时,你在肩膀上点击他,当他转身看看你想要什么时,不要太惊讶。