开发用于功能安全测试的自主交通模拟框架
穆斯塔法·萨拉奥夫卢,Technische Universität德累斯顿
虽然先进驾驶辅助系统(ADAS)和自动驾驶汽车控制系统的功能安全评估需求日益增长,但在各种驾驶条件下测试具有众多配置参数的决策和控制算法是一项艰巨的任务。车载测试可能需要数十万小时的驾驶时间,即便如此,重现、诊断和重新测试问题场景的挑战仍然存在。
我正在与Technische自动化研究所的同事一起工作Universität德累斯顿MOBATSim,一个模拟框架,使工程师能够评估自动驾驶车辆决策和控制算法,可视化其性能,并分析其对城市交通环境的影响(图1)。

图1。用于评估功能安全性的MOBATSim仿真框架。
完全用MATLAB构建®和仿真软万博1manbetx件®MOBATSim使测试工程师能够评估算法的功能安全性,不仅在简单的模拟中,例如,一辆领先的汽车和一辆尾随的汽车,而且在复杂的环境中,多辆汽车以不同的速度行驶,传感器或通信系统可能存在故障。在早期设计阶段,工程师可以使用MOBATSim作为虚拟环境,以减少测试时间和成本,并将其作为采用ISO 26262道路车辆功能安全标准的框架。
发展MOBATSim
我们开始开发MATLAB算法,计算简单的纵向(加速和减速)和纬度(左和右)车辆运动。我们将这些算法作为MATLAB系统块集成到Simulink模型中。万博1manbetx我们添加了子模型来实现自动驾驶系统常见的感知、决策和轨迹规划任务(图2)。

图2。万博1manbetxSimulink模型,包括感知、决策和轨迹规划组件。
由于MOBATSim具有模块化架构,我们可以随着项目的发展提高单个组件的保真度,例如传感器融合、车辆动力学和车辆间通信。为了加快MOBATSim初始版本的开发,我们建立了这些组件的简单模型;例如,最初的纵向控制模型使用了一个直接的传递函数来将加速度与车速联系起来;它没有考虑轮胎打滑或空气阻力等因素。
注入故障
ISO 26262标准推荐使用故障注入来研究故障组件和错误传播在系统中的影响。MOBATSim支万博1manbetx持多种故障注入选项,包括传感器噪声、卡在故障和车对车(V2V)或车对基础设施(V2I)通信中的网络延迟。
为了建立性能基线,算法首先在理想(无故障)运行条件下在MOBATSim中进行模拟。仿真参数,如车辆数量,车辆起点,终点,尺寸和最大速度,可以通过MATLAB文件或MOBATSim接口指定(图3)。
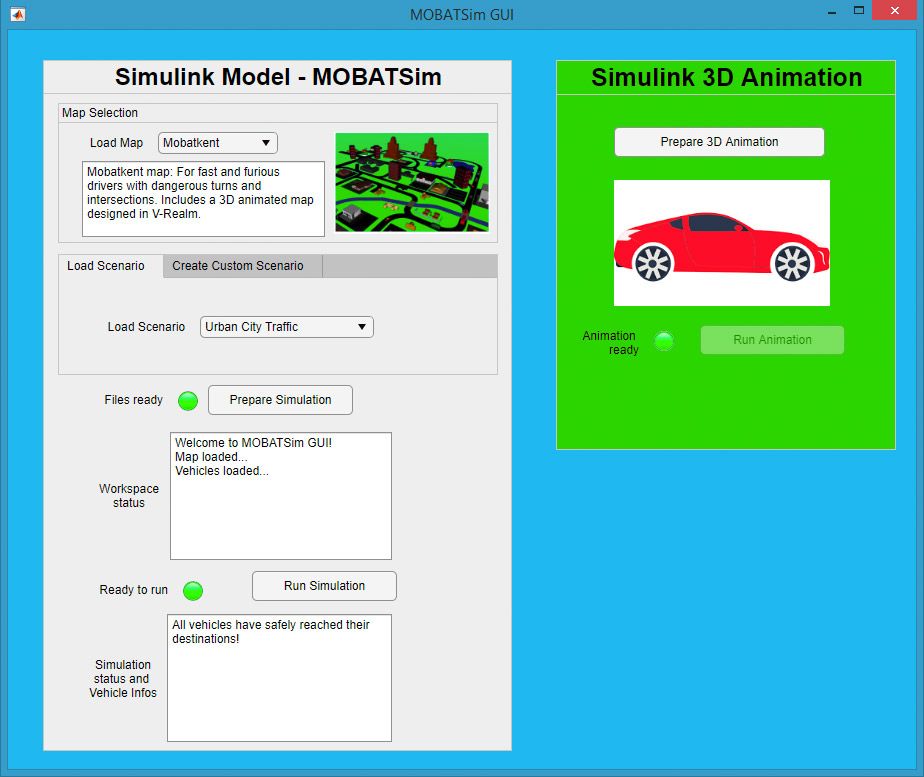
图3。MOBATSim接口,用于配置和启动模拟运行,使用MATLAB应用程序设计器开发。
在现实场景中,车辆可能同时遇到多个严重程度不同的故障。通过MOBATSim,我们可以运行大量的模拟来评估在日益困难的条件下运行的自动驾驶系统的安全性,并确定系统开始故障的位置。例如,当我们改变卡死故障的持续时间时,我们可以稳定地增加前距离传感器上的噪声。在Simulink中运行仿真后,我们将结果在MATLAB中万博1manbetx可视化,以确定车辆无法保持安全跟随距离的条件(图4)。

图4。安全距离违反作为卡在故障持续时间和传感器噪声的函数。
MOBATSim学生项目:路口管理
我是MOBATSim的主要开发者,但德累斯顿理工大学的其他学生也参与了这个项目。一些学生改进模拟框架的个别组件,而另一些学生则使用该框架进行自己的研究。
最近的一个学生项目集中在自主交叉路口管理。与MOBATSim合作,该学生开发并模拟了一个管理系统,该系统最大限度地减少了通过繁忙十字路口的车辆的行驶时间和能源消耗。车辆在接近交叉口时使用V2I通信向交叉口管理算法发送信号,并从交叉口管理算法接收信号,以确保安全、优化地通过交叉口。
对于大多数MOBATSim模拟,包括在交叉口管理项目中进行的模拟,使用2D动画将车辆的运动可视化就足够了。然而,对于最后的演示,我们使用Simulink 3D Animation™创建3D可视化,因为这些提供了一种更吸引人的方式来演示动态系万博1manbetx统行为(图5)。

图5。用Simulink 3D动画生成的模拟驾驶场景。万博1manbetx
认可及计划改善
MOBATSim在去年的Simulink学生挑战赛中获得第一名,这是一项面万博1manbetx向所有使用MATLAB和Simulink的学生的全球竞赛。我们的长期目标是让汽车oem厂商采用MOBATSim对自动驾驶系统进行功能安全评估。
MOBATSim仍在积极开发中,我继续与德累斯顿工业大学的学生合作,提高框架各个方面的保真度,以提高整体模拟精度。计划中的增强包括故障注入的自动化和使用并行计算来加速模拟。我们的团队也在考虑添加新的自动驾驶和车辆动力学功能,包括与虚幻引擎的联合仿真®场景,用模型预测控制器替换一些我们专门为车辆跟踪情况编写的算法。我们目前使用的是带外环距离控制和内环速度控制的PID,它快速有效,但没有模型预测控制器准确。
我们最近创造了一个开源版本的MOBATSim可在文件交换平台下载.
2020年出版的
s manbetx 845产品使用
您也可以从以下列表中选择一个网站: