永磁同步电机磁场定向控制
永磁同步电机磁场定向控制
- 库:
Simscape /电气/控制/ PMSM控制
描述
的永磁同步电机磁场定向控制块实现了永磁同步电机(PMSM)的场向控制结构。磁场定向控制(FOC)是一种通过将固定相电流转换为旋转框架来解耦转矩和磁链的高性能交流电机控制策略。当转子转速和位置已知时使用FOC,并且您的应用需要:
启动时扭矩大,电流小。
效率高。
方程
永磁同步电机FOC结构采用转子d-q参考系对转矩和磁通进行解耦。该图显示了块的整体架构。
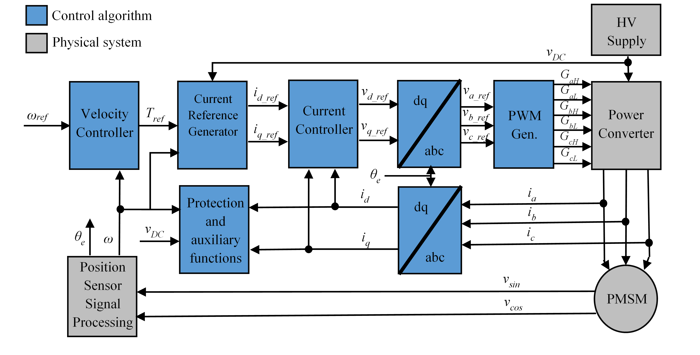
图中:
ω和ω裁判分别为实测角速度和参考角速度。
T裁判为参考电磁转矩。
我和v定子电流、电压和下标是否正常d和问代表了d设在和问-轴和下标一个,b,c,表示三个定子绕组。
θe是转子电角。
G门是脉冲,下标吗H和l,表示高和低,以及下标一个,b,c表示三个定子绕组。
控件可以选择实现速度或转矩控制控制方式参数。该块完全按照图中所示实现速度控制。该块通过移除速度控制器块并直接接受参考转矩来实现转矩控制。
假设
机器参数是已知的。
限制
控制结构采用单采样率实现。
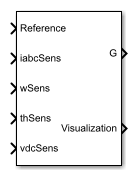
港口
输入
输出
参数
参考文献
[1]贝尔纳斯,T, V. F.蒙塔格纳,H. A. Gründling,和H.皮涅罗。永磁同步电机无传感器矢量控制的离散滑模观测器。IEEE工业电子学汇刊。Vol. 61, no . 4, 2014, pp. 1679-1691。
[2]卡皮亚克,S.和C.拉扎尔。基于永磁同步电机的汽车牵引驱动的快速实时约束预测电流控制。IEEE交通电气化汇刊。Vol.1, no . 4, 2015, pp. 326-335。
哈克,M. E.钟,M. F.拉赫曼。改进的轨迹控制的内部永磁同步电机驱动器与扩大的操作极限。电气与电子工程杂志。第22卷第1期,2003年,第49页。
[4]杨宁,罗国强,刘伟,王坤。电动汽车内永磁同步电机控制用查找表。第七届国际电力电子与运动控制会议。Vol. 2, 2012, pp. 1015-1019。
扩展功能
版本历史
在R2017b中引入
您也可以从以下列表中选择一个网站: