雷达链路预算分析
此示例显示了如何使用雷达设计师应用程序根据一组性能要求执行雷达链路预算分析和设计雷达系统。雷达设计师允许用户从五种预设雷达类型之一开始设计新的雷达系统,设置性能要求,计算雷达度量,配置环境,并比较几种替代设计。您还可以将设计导出为Matlab®脚本以进行进一步分析。
介绍
雷达范围等式是一个强大的工具,将雷达系统的主要参数连接在一起。它可以为雷达工程师提供关于系统性能的好主意,而无需借助复杂的分析和模拟。当有关各种组件的特定信息(例如,天线阵列的传输波形,信号处理算法等)的特定信息时,雷达方程在设计的早期阶段特别有用。尽管雷达方程仅提供近似结果,但是通过考虑雷达系统的组件和信号传播介质引入的损耗,可以显着提高分析的保真度。这雷达设计师应用程序是执行雷达方程分析的工具,也称为雷达链路预算分析。它为雷达系统,目标和环境提供了具有许多可调参数的用户,并提供一组可视化来帮助选择这些参数。这雷达设计师应用还允许基于一组性能要求设计雷达系统。
此示例显示了如何使用雷达设计师应用程序设计X波段监控雷达,用于检测小目标。该设计基于以下要求规范:
峰值发射功率不应超过2000W
雷达应在方位角和60度的高度覆盖范围内提供360度覆盖率
雷达应检测小型载体飞机,雷达横截面为1米 在300米到18公里的范围内
雷达应检测小型无人机(UAS),雷达横截面为0.03米 在300米到8公里的范围内
检测和假警报的可能性分别为0.9和1E-6
雷达应解决两个具有相同方位角和高度范围内的目标的目标,其范围为30米
雷达应具有2米,0.2°和0.5°的范围,方位角和高度精度
雷达应检测速度高达180 km / h的速度
雷达应在大雨(16mm / hr)条件下保持其准确性和检测性能
新会议
这雷达设计师应用程序可以使用命令启动:
radardesigner.
默认情况下,应用程序允许用户使用ToolStrip中的相应按钮启动新的或打开现有会话。新会议提供五种预定义雷达类型之一:机载,机场,汽车,跟踪和天气。在此示例中,我们将默认的机场雷达用作起点。
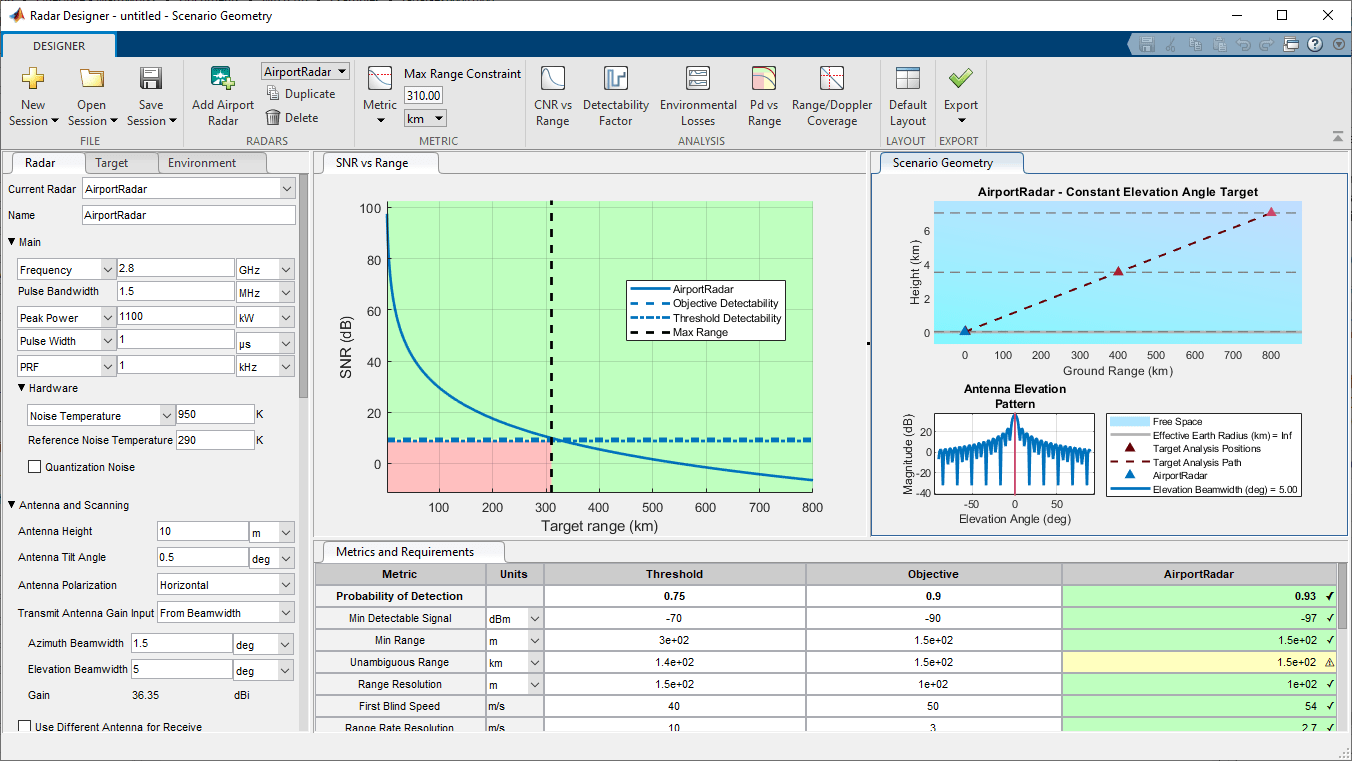
一旦加载了一个新的会话,雷达设计师应用程序呈现用户以下文档组:
左侧的雷达,目标和环境面板
SNR与中心和右侧的SNR VS范围和场景几何图
底部的指标和要求表
作为开立新会话后的第一步,我们将更改当前设计的名称在顶部雷达小组新设计。
指标和要求
在此示例中,我们有一个规范,详细说明了最终系统的性能。但是,它没有指定实现所需性能水平所需的所有设计参数。大多数设计参数必须源自规范中给出的要求。这雷达设计师App提供了一种方法来从性能要求中导出雷达设计参数。
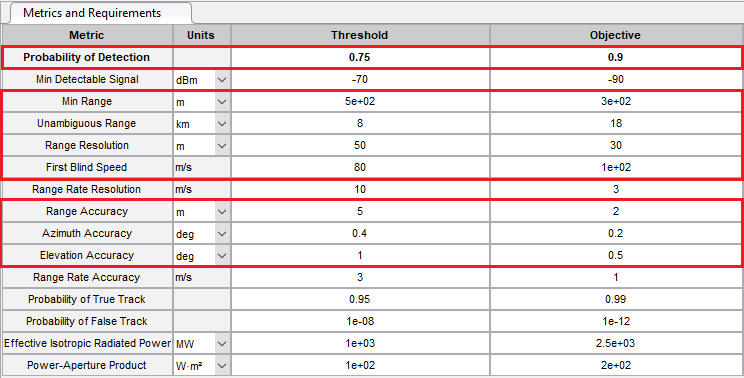
绩效指标和相应的要求被居住在指标和要求桌子。对于每个性能度量标准,应用程序有两个要求值:
临界点- 描述度量的最小性能水平;客观的- 定义将使新系统能够完全满足任务需求的度量标准的值。
之间的价值临界点和客观的构成雷达工程师可以使用的贸易空间来平衡多个,有时相互冲突的性能要求。
计算的度量标准,如图所示指标和要求表,可以通过最大范围或检测概率来约束。选择用作约束的变量的选择是通过的公制按钮在公制Toolstrip的一部分。选择最大范围作为约束意味着显示的性能指标指标和要求表在指定的最大范围内计算。选择作为约束的检测概率意味着假设指定的检测值的指定值计算所显示的度量。在这个例子中,我们对两个范围感兴趣:1)为载人飞机18公里,2克,为UAS 8公里。我们从载人飞机开始并设置公制在工具串中到最大范围约束18公里。

作为下一步,我们填充了临界点和客观的价值的价值度量和要求表格与规范中给出的数字。在此示例中,规范仅为每个性能度量提供单个值。我们使用这个值来设置客观的要求。然后我们设置相应的临界点靠近的合理价值客观的。虽然系统的所需性能是由客观的要求,系统被认为具有可接受的性能临界点要求满足。需要这种灵活性来创建用于选择设计参数的贸易空间,否则可能是困难或无法选择的。由于规范没有提供表中所示的所有度量的要求,我们将这些指标设置为默认值的要求。
目标参数
目标参数设置为目标控制板。由于我们首先考虑小型载人飞机,我们将目标的雷达横截面设置为1米
。抖动模型改变为摇晃1模拟更现实的波动目标。

雷达参数
在要求和目标参数已设置后,我们可以开始调整雷达设计参数,以便计算的指标符合所述要求。雷达设计器应用程序提供了一种方便的方法来监控计算的指标状态的状态,同时更改设计参数的值。这些条目指标和要求表是编码的颜色,以指示计算的度量标准的状态。符合相应的指标客观的要求以绿色的,度量标准彩色,值临界点和客观的是黄色的,以及不符合的指标临界点要求是红色的。SNR VS范围和PD VS范围图中也使用相同的颜色以显示满足检测要求的范围。
保证1米
RCS目标在18公里的期望范围内检测到,我们调整雷达设计参数,以确保SNR VS范围图上的SNR曲线高于客观可检测线最大范围。

雷达设计参数分为四个部分。每个部分调整如下:
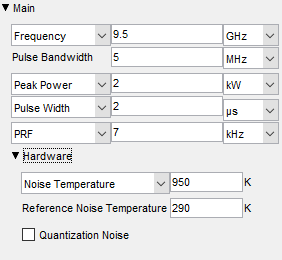
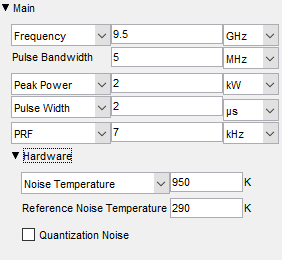
主要的。雷达工作频率和峰值功率被设置为规范中给出的值。调整脉冲带宽以满足范围分辨率要求,脉冲宽度设定为在最大范围内实现足够高的可用SNR。选择7 kHz PRF值,在21.4 km明确范围内找到权衡,最大明确的明确速度为198 km / h(第一个盲目速度为396 km / h)。通过范围/多普勒覆盖图,通过了范围/多普勒覆盖范围按钮在分析ToolStrip的一部分用于可视化目标速度和范围之间的贸易空间。
天线和扫描。天线高度,倾斜和极化保持不变。方位角和高度天线波束宽度分别设定为2和6度以满足方位角和高度精度要求。这扫描模式被设定为机械的为了便于方位角的360度覆盖率,并且扫描扇区高度尺寸设置为如本说明书中给出的60度。天线和扫描部分还表明,搜索卷的大小为5.441 Steradians,扫描此卷的时间为6.38秒。在分析中包括扫描,增加了链路预算的波束形状损耗和光束停留因子。

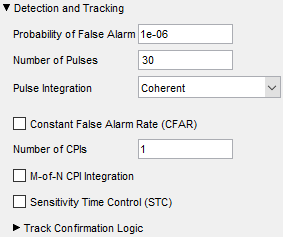
检测和跟踪。误报的概率被设置为1E-6所需的值。选择相干脉冲的数量,使得客观可检测确定检测抖动1个案例目标所需的SNR的值分别在0.9和1E-6的检测和误报的所需概率下,低于可用的SNR,在18公里的指定最大范围约束。
损失因素。要考虑由于脉冲日食引起的损失,我们将统计日食丢失损失添加到链路预算分析。

经过这些调整后,度量和要求表格显示,这种设计满足了带有1米的rcs的小型载体飞机的规格
或者更大。来自SNR VS系列情节我们可以看到实现的可检测性因子客观的0.9的检测概率约为10 dB,而可检测性因子临界点0.75的要求接近5 dB。由于可用的SNR曲线高于客观可检测线在18公里,所产生的检测概率高于所需的概率客观的价值,等于0.92。这指标和要求表还显示检测1米所需的最小可检测信号
具有这种检测概率的目标是-92 dBm。
环境参数
到目前为止,此示例假设无任何大气衰减的自由空间传播。为了进行分析更准确,可以包括传播和大气衰减引起的损失和参数化环境控制板。
该规范指出,设计下的雷达必须维持所需的检测性能和大雨(16 mm / hr)的测量精度。为了包括分析中降水导致的路径损失,我们设置了降水类型到雨在里面沉淀部分环境控制板。然后,我们选择ITU模型并设定降水范围,使得所有感兴趣的范围都存在16毫米/小时的雨。现在指标和要求表和SNR VS范围图显示,最大范围的检测概率远低于所需的0.9。

这环境损失情节更好地了解降水损失对整体损失预算的贡献。它通过了环境损失按钮分析部分。由于传播和大气衰减,该曲线可视化4种类型的依赖性损耗。这降水损失子图显示16毫米/小时的雨量在18公里处额外损失4.8 dB。这导致检测从0.92到0.55下降的概率下方临界点要求。因此,系统的性能在大雨条件下变得不可接受,并且不符合规格。
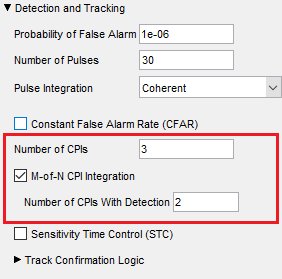
M-of-N CPI集成
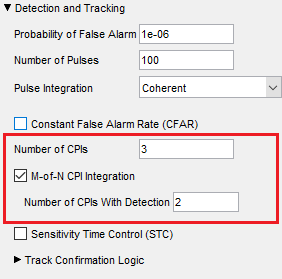
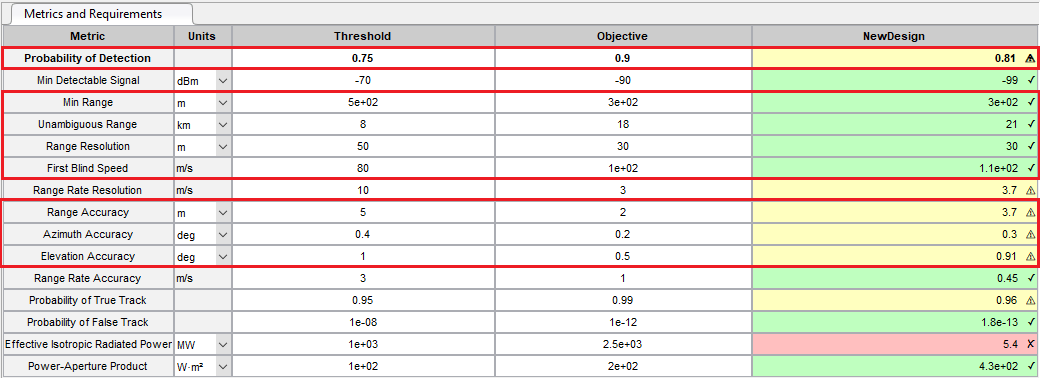
通过增加接收器处可用的SNR或通过减少检测所需的SNR(可检测性因子)来改善检测概率。后一种方法在实践中可能更具吸引力,因为可以通过应用不需要在硬件中更改的信号处理技术来实现可检测性因子。通过集成更多脉冲可以减少可检测因子。然而,目标RC波动通常对可以连贯的脉冲量施加限制。在寻址RCS波动问题的同时将更多脉冲集成的可能解决方案是通过多个相干处理间隔(CPI)的M-N的积分。在每个CPI内,脉冲连贯地集成,然后在CPI跨CPI应用N-N的集成。导航到雷达面板并设置CPI的数量检测和跟踪截面至3和检测到2的CPI的数量将导致检测概率从0.55增加到0.81增加。
虽然检测概率仍然低于指定的概率客观的价值,它遇到了临界点要求。这意味着该系统在大雨中具有可接受的检测性能。类似地,范围,方位角和高程精度清除临界点要求但低于各自客观的价值观。
打开这个设计雷达设计师。
Radardesigner('survillanceradarsmalltargets.mat')
小UA
为了验证此雷达设计是否具有令人满意的性能,当目标是小UA时,我们将目标RCS更改为0.03米
并将公制约束设置为8km的最大范围。SNR VS Range Plot显示此设计的可用SNR高于客观可检测线在8公里处,由此范围的检测概率为0.94,远高于所需值。该系统能够在8km处满足检测概率的客观要求,因为大气衰减的影响更近于更近的范围。

然而,所得到的范围和高程精度仍然低于客观的以上临界点要求
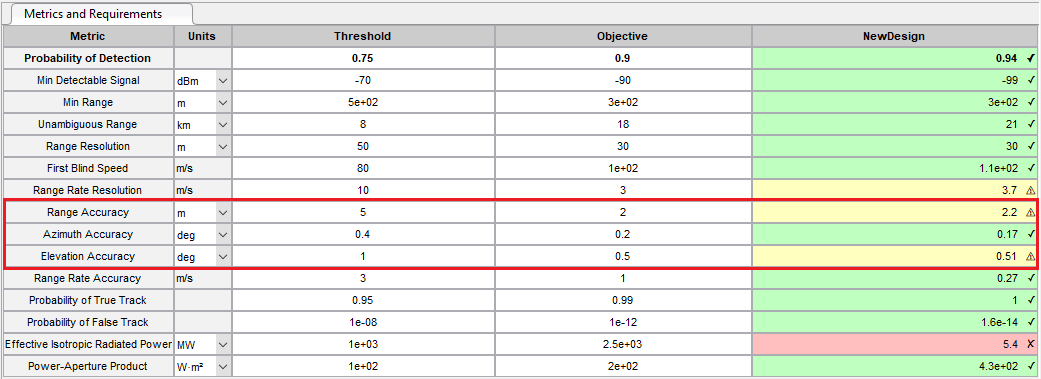 。
。
出口
这雷达设计师允许通过单击将创建的设计导出为MATLAB脚本出口按钮在出口ToolStrip的部分和选择导出SNR VS Range Matlab脚本。导出的脚本包含所选雷达,目标和环境参数,并再现SNR VS范围绘图。它可用于进一步实验,增强和修改设计。此外,结果显示在指标和要求表也可以通过单击作为单独的MATLAB脚本导出出口然后选择生成指标报告。执行时,此脚本输出计算指标的格式化报告。
概括
此示例显示了如何使用雷达设计师应用程序对监视雷达系统进行链接预算分析,用于检测小目标。该示例以规范和一组性能要求开头。它展示了如何设置客观的和临界点要求基于规范中提供的值。然后,借助SNR VS范围图和氧化灯颜色编码,如何调整雷达设计参数,使得设计满足所规定的要求。该示例还示出了如何将目标参数更改为模型载人和无人驾驶飞机,以及如何配置环境设置以包括由于降水到分析中的大气损耗。
您还可以从以下列表中选择一个网站: