Errror:未定义的函数“getActionInfo”“结构”类型的输入参数。
13个视图(30天)
显示旧的评论
嗨
这将工作之前。现在我得到一个错误当我试着测试RL代理。这是数据类型的预期的问题吗?
我提供的错误消息以及属性代理操作和观察对象。
错误消息
- >
未定义的函数“getActionInfo”“结构”类型的输入参数。
代理和观察对象:
> > DDPG_agent.agent.getActionInfo
rlNumericSpec属性:
LowerLimit: 0
UpperLimit: 100
名称:(0×0的字符串)
描述:(0×0的字符串)
维度:[1]
数据类型:“双”
> > DDPG_agent.agent.getObservationInfo
rlNumericSpec属性:
LowerLimit(3×1双):
UpperLimit(3×1双):
名称:“观察”
描述:“流控制,误差,误差积分”
维度(3 - 1):
数据类型:“双”
2的评论
Emmanouil Tzorakoleftherakis
2021年9月13日
在上面的代码中错误在哪里?我没有看到一个错误当你叫getActionInfo。你能附上垫文件所需的变量复制呢?你用的也释放?
答案(2)
Rajesh Siraskar
2021年9月22日
你好Emmanouil
谢谢你的帮助。错误不是在代码中
运行的很好。这是
模拟运行产生错误
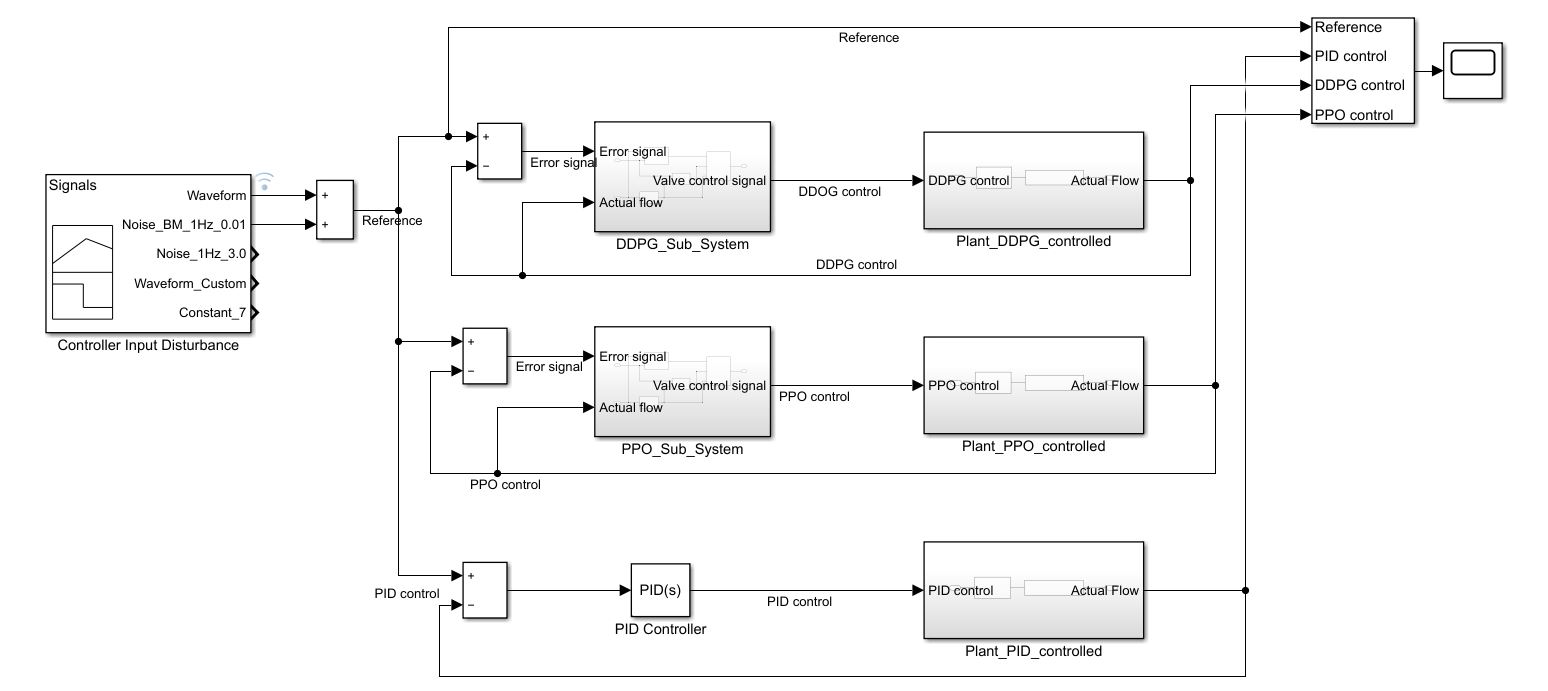
。我试图添加下面的框图和原始的模拟输出。
仿真(时间:2秒)= = = = = =
错误:错误“sm_DDPG_PPO_Experimental_Setup / DDPG_Sub_System / DDPG_Agent”:未能评估面具初始化命令。
引起的由:
MATLAB系统块sm_DDPG_PPO_Experimental_Setup / DDPG_Sub_System / DDPG_Agent / AgentWrapper的错误发生在调用“getSampleTime”“rl.simulink.blocks.AgentWrapper”的方法。万博1manbetx抛出的错误”
“C: \ Program Files \ MATLAB工具箱\ R2020b \ \ rl万博1manbetx \ rl \仿真软件\ \ AgentWrapper.m + rl \ +仿真软件\ +块”在第152行
“C: \ Program Files \ MATLAB工具箱\ R2020b \ \ rl万博1manbetx \ rl \仿真软件\ \ AgentWrapper.m + rl \ +仿真软件\ +块”在第202行
“C: \ Program Files \ MATLAB工具箱\ R2020b \ \ rl万博1manbetx \ rl \仿真软件\ \ AgentWrapper.m + rl \ +仿真软件\ +块”在第257行
“C: \ Program Files \ MATLAB工具箱\ R2020b \ \ rl万博1manbetx \ rl \仿真软件\ \ agentmaskinit.m + rl \ +仿真软件\ +块”在行11”。
未定义的“getActionInfo”函数输入参数类型的“结构”。
错误:错误“sm_DDPG_PPO_Experimental_Setup / PPO_Sub_System / PPO_Agent”:未能评估面具初始化命令。
引起的由:
MATLAB系统块sm_DDPG_PPO_Experimental_Setup / PPO_Sub_System / PPO_Agent / AgentWrapper的错误发生在调用“getSampleTime”“rl.simulink.blocks.AgentWrapper”的方法。万博1manbetx抛出的错误”
“C: \ Program Files \ MATLAB工具箱\ R2020b \ \ rl万博1manbetx \ rl \仿真软件\ \ AgentWrapper.m + rl \ +仿真软件\ +块”在第152行
“C: \ Program Files \ MATLAB工具箱\ R2020b \ \ rl万博1manbetx \ rl \仿真软件\ \ AgentWrapper.m + rl \ +仿真软件\ +块”在第202行
“C: \ Program Files \ MATLAB工具箱\ R2020b \ \ rl万博1manbetx \ rl \仿真软件\ \ AgentWrapper.m + rl \ +仿真软件\ +块”在第257行
“C: \ Program Files \ MATLAB工具箱\ R2020b \ \ rl万博1manbetx \ rl \仿真软件\ \ agentmaskinit.m + rl \ +仿真软件\ +块”在行11”。
未定义的“getActionInfo”函数输入参数类型的“结构”。
Rajesh Siraskar
2021年9月23日
1评论
Emmanouil Tzorakoleftherakis
2021年9月23日
几个建议:
1)确保DDPG_agent。代理和PPO_agent。代理是实际的代理对象和结构
2)
在仿真软件模型万博1manbetx中,确保改变RL代理代理对象的字段PPO_agent块。代理或DDPG_agent。代理根据需要(我怀疑你可能已经忘了这样做)