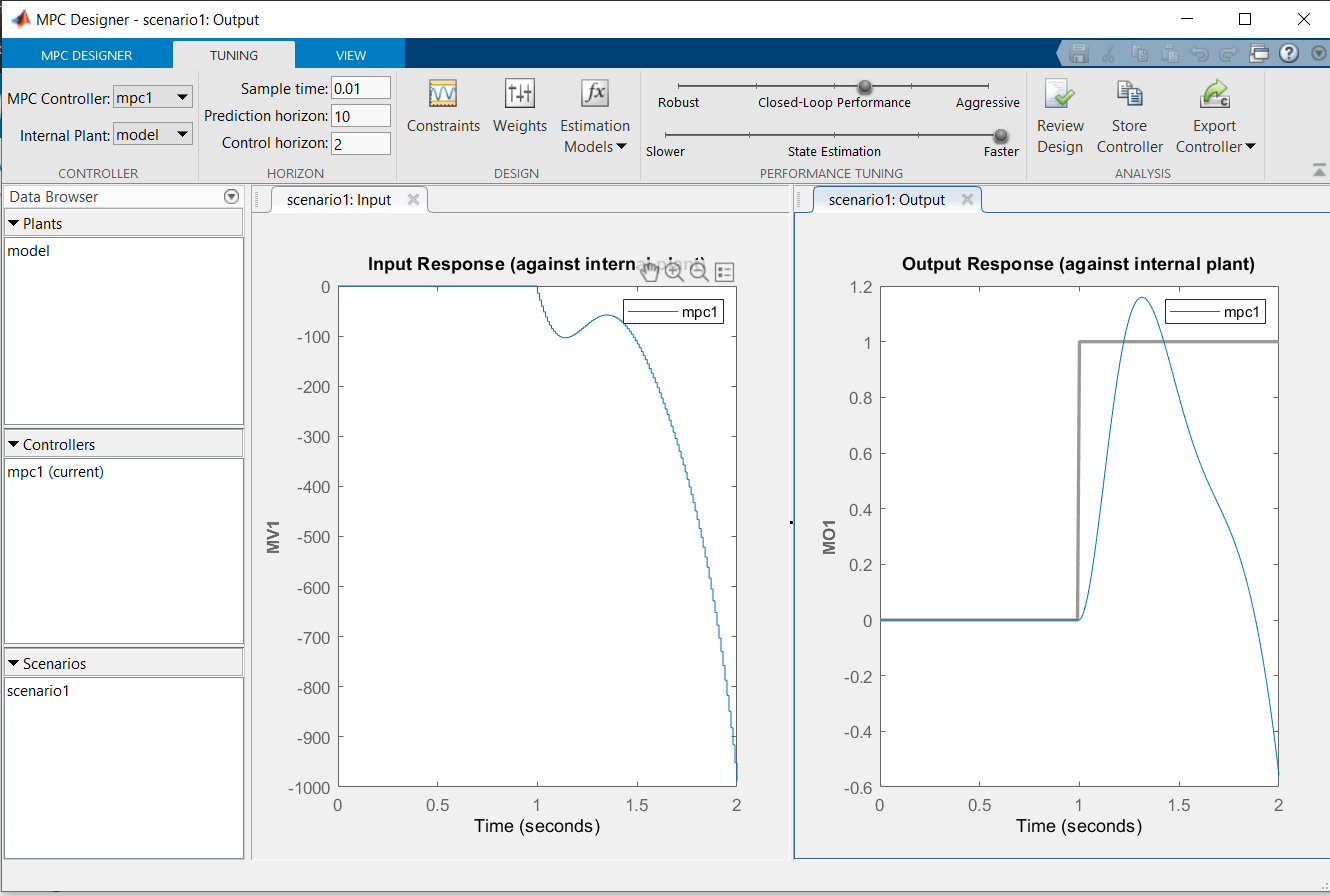
我明白你想要得到好的使用MPL设计师应用系统的阶跃响应。
分析了系统,我可以说系统
是不可控的
系统的能控性矩阵的行列式的范围
10 ^ -12。
找到可控性矩阵可以使用”
ctrb
“命令:
发现矩阵的行列式可以用“
依据
“命令:
