Continuous/Discrete-Time SDRE: Gravity Compensation
version 1.0.2 (11 KB) by
Saeed Rafee Nekoo
This page presents the MATLAB codes for continuous and discrete-time SDRE controllers considering gravity compensation.
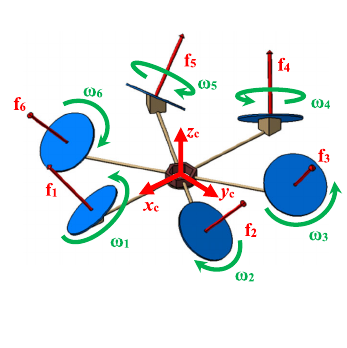
The codes present simulations for a manipulator and a hexacopter drone controlled by SDRE in the continuous and discrete-time domain. Gravity compensation was done to provide the signal for maintaining the system at desired condition. The codes are related to the article:
Nekoo, S.R Acosta, j,轮胎式压路机o, A.: Gravity compensation and optimal control of actuated multibody system dynamics. IET Control Theory Applications. 1–15 (2021).
https://doi.org/10.1049/cth2.12206
Cite As
Nekoo, S.R Acosta, j,轮胎式压路机o, A.: Gravity compensation and optimal control of actuated multibody system dynamics. IET Control Theory Appl. 1–15 (2021) https://doi.org/10.1049/cth2.12206.
MATLAB Release Compatibility
Created with R2021b
Compatible with any release
Platform Compatibility
Windows macOS LinuxTags
Community Treasure Hunt
Find the treasures in MATLAB Central and discover how the community can help you!
Start Hunting!Discover Live Editor
Create scripts with code, output, and formatted text in a single executable document.