模型预测控制(MPC)预测并优化未来时间范围内的时变过程。此控制包接受线性或非线性模型。使用大规模非线性规划求解器,如APOP和IPOPT,它解决了数据协调、移动地平线估计、实时优化、动态仿真和非线性MPC问题。
此目录中包含三个示例文件,该目录实现了用于线性时间不变(LTI)系统的控制器:
1. APM1_LTI - 将任何LTI模型转换为APM格式
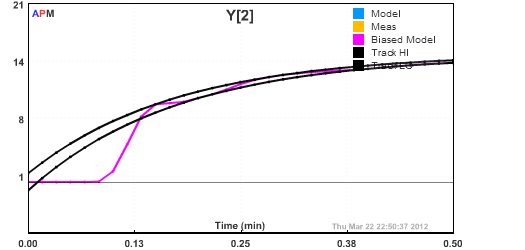
2. APM2_STEP - 执行步骤测试以确保模型精度
3. APM3_CONTROL - MPC设定值更改为新目标值
步骤2和3还打开web界面以查看步骤或控制器响应。其他文档和示例问题见:
两周期的网络研讨会也被托管以展示新的应用程序并提供教程。事先介绍包括无人驾驶飞行器(无人机),摩擦搅拌焊接(FSW),生物系统,储能,燃烧,燃料电池等申请。
http://apmonitor.com/wiki/index.php/main/applicationWebinar.
控制计算作为Web服务执行。脚本文件将所需信息发送到执行计算的服务器。结果返回到脚本以进行趋势或进一步分析。
引用
John Hedengren(2021年)。模型预测控制(//www.tianjin-qmedu.com/matlabcentral/fileexchange/35825-model-predictive-control),Matlab中央文件兑换。检索到。
MATLAB版本兼容性
用R2011B创建
与任何版本兼容