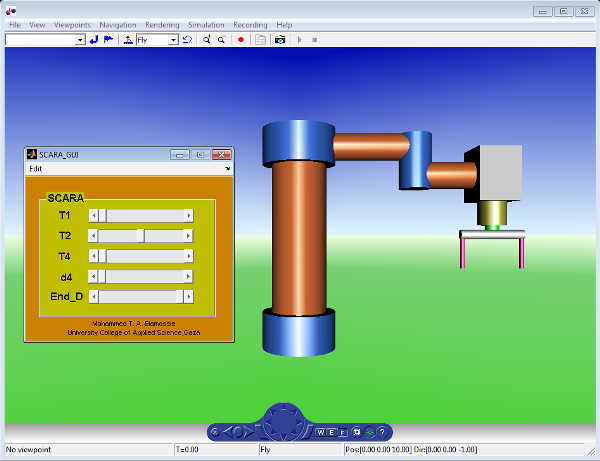
本文所承担的任务是实现SCARA ARM机器人的计算机程序,利用虚拟现实环境编写了三维界面程序,利用m-file建立了轨迹和路径规划,并建立了一个GUI文件来手动控制机器人。
我们的项目最糟糕的地方就是从特定的位置抓住一个球或任何东西,沿着特定的路径直到到达目的地,并在最终位置保持它的自由。
引用作为
穆罕默德ELAMASSIE(2021)。SCARA机械手(//www.tianjin-qmedu.com/matlabcentral/fileexchange/37926-scara-manipulator), MATLAB中央文件交换。检索.
MATLAB版本兼容性
创建R2007b
与任何版本兼容