编者按:此文件被选为Matlab Central本周精选
SIM.I.AM是一种机器人模拟器,可用于学习如何将控件应用于移动机器人。
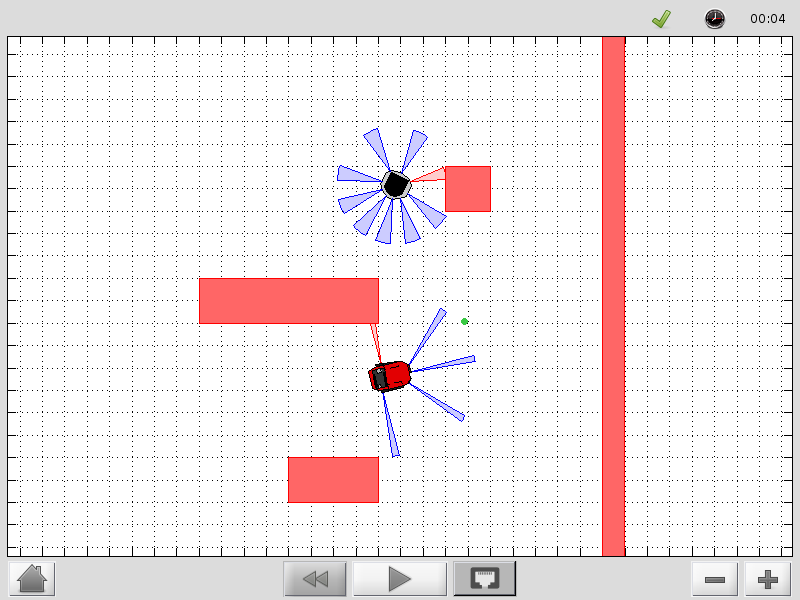
该应用程序是一个多智能体应用程序的演示,其中一个机器人跟随另一个机器人通过一个混乱的环境。包括屏幕上的说明。
一个手册被包括,以帮助学习如何与模拟器工作。它还提供了一组编程练习,重点是如何从头开始实现移动机器人导航系统(在应用程序中找到)。
SIM.I.AM由格鲁吉亚理工学院的格鲁吉亚机器人和智能(GRITS)实验室维护。项目页面位于http://gritslab.gatech.edu/projects/robot-simulator.
引用作为
让-皮埃尔·德拉克罗伊(2021)。sim.i.am.GitHub (https://github.com/jdelacroix/simiam)。检索.
Matlab释放兼容性
创建R2012b
兼容任何版本
平台的兼容性
视窗 macOS Linux类别
标签
+ simiam / +应用
+ simiam / +容器
+ simiam / +控制器
+ / + khepera3 simiam / +控制器
+ / + quickbot simiam / +控制器
+ simiam / +机器人
机器人+ simiam / + / +司机
机器人+ simiam / + / +动力学
+ Simiam / +机器人/ +传感器
机器人+ simiam / + / + / +传感器噪声
+ simiam / +模拟器
+ simiam / + ui
+ simiam / +跑龙套
捆绑/网格劳顿
绑定/ findjobj
捆绑/ MATLAB_CODE_KIT / + MCODEKIT / +列表
万博1manbetx
万博1manbetx
要查看或报告这个GitHub插件中的问题,请访问GitHub库.
要查看或报告这个GitHub插件中的问题,请访问GitHub库.