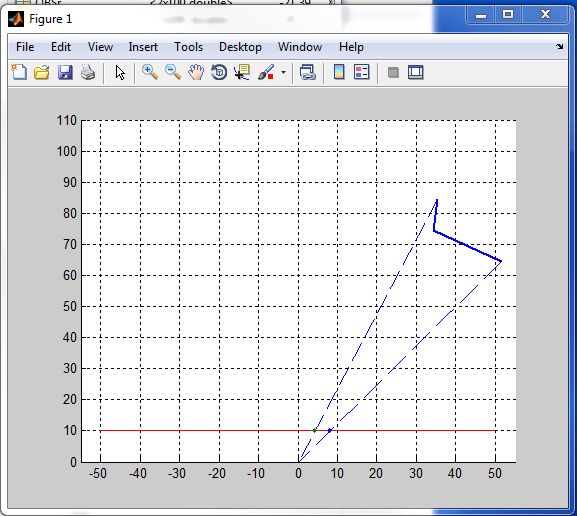
这是我对Ted Broida的“物体运动估计”的Matlab实现
噪声图像的参数。”这是一个非常早期的工作使用卡尔曼滤波执行对象跟踪。这篇论文做了很多假设,比如结构是已知的,我们得到的是一个二维物体的一维视图,但它为未来的方法铺平了道路。
从一个适应滤波的新手的角度来看,我相信这创建了一个应用IEKF的完美示例问题,因为它很简单,您可以集中精力研究算法是如何工作的。加上滤波器的输入有物理意义。
最好的开始方法是阅读。pdf文件。这是我为这个项目写的文章,希望能解释清楚它是如何工作的。
接下来要做的就是简单地运行“CompleteSimulation”。“我试着让代码非常易读,所以希望你能直接阅读脚本。
将此文件提交到文件交换的最大原因是“f_IEKF”。m“这是真正实现过滤器的函数,花了好几天的时间来编写。它没有逐行注释,但我选择的变量与大多数书中看到的理论部分一致。我希望这将是清楚的,并帮助有人在那里。
引用作为
卢卡斯·查韦斯(2022年)。迭代扩展卡尔曼滤波器的目标跟踪(//www.tianjin-qmedu.com/matlabcentral/fileexchange/42156-object-tracking-with-an-iterative-extended-kalman-filter-iekf), MATLAB中央文件交换。检索.
代码/
您也可以从以下列表中选择网站: