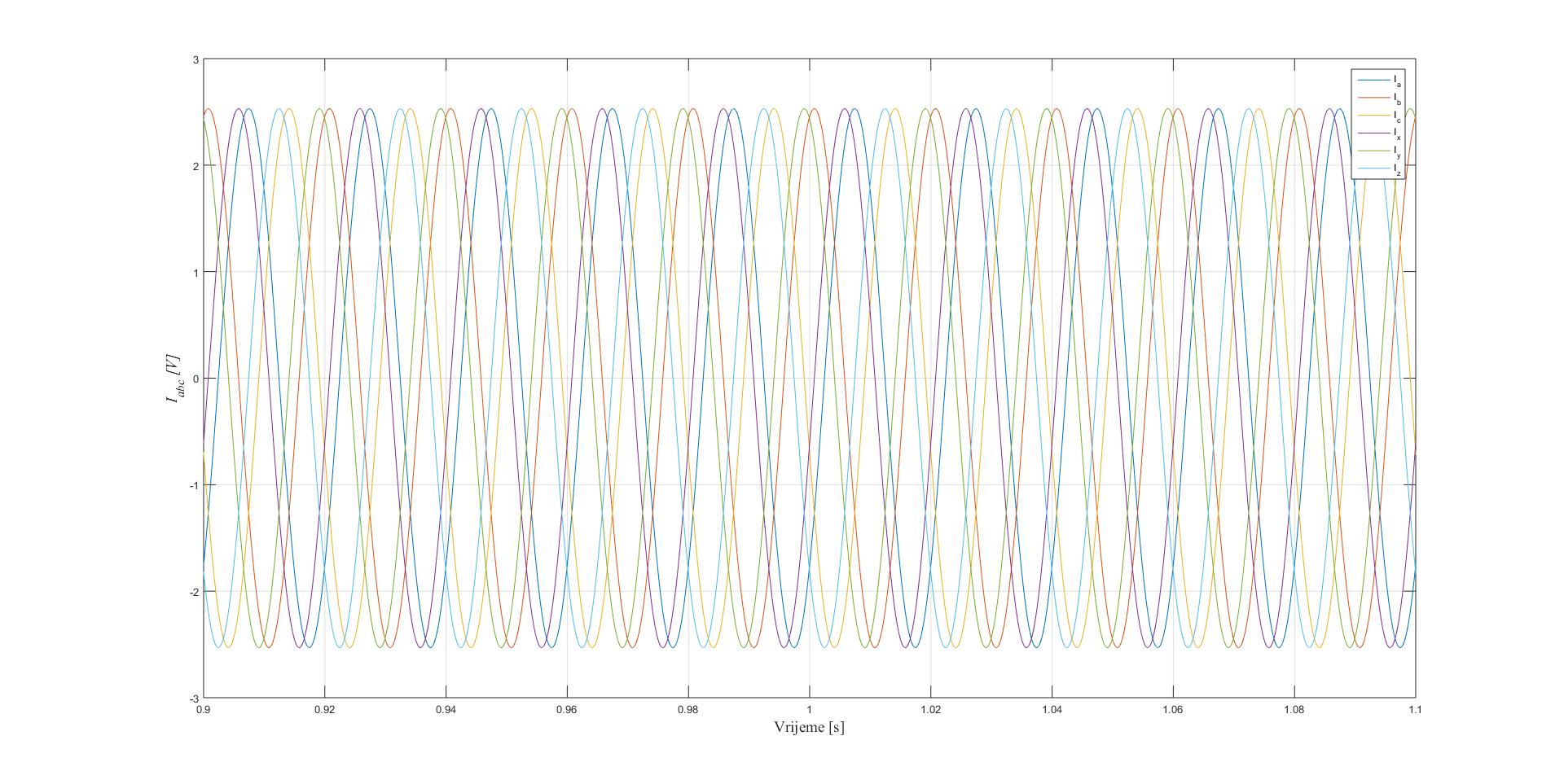
六相感应电动机在stacionary参考系建模。与三相机、六个阶段机模型包含两个stacionary ortogonal坐标框架:α-β和x - y框架。x - y框架在不活跃的平衡系统,但它是活性,并帮助机电转换,在不平衡的条件下。
引用作为
亚历山大Mrakovic (2022)。六相感应电动机(//www.tianjin-qmedu.com/matlabcentral/fileexchange/56125-six-phase-induction-motor), MATLAB中央文件交换。检索。