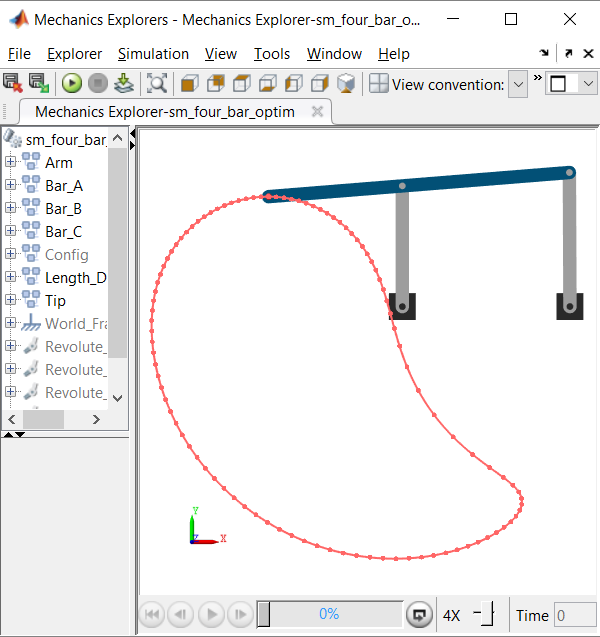
此示例显示了在Simscape多体中建模的四个条形链接,其使用MATLAB优化,使得连接尖端遵循所需的轨迹。
机械设计师经常希望设计能够遵循一定程度的末端执行器的机制。链路的长度和末端效应器的位置影响到复杂的运动关系中的末端效应器的轨迹。优化算法可用于调谐这些长度以达到所需的运动。
这个过程类似于“机械角色的计算设计”视频中的描述。https://www.youtube.com/watch?v=DfznnKUwywQ
在这个例子中,当改变长度的子集时,执行参数扫描以查看哪些轨迹是可能的。然后利用MATLAB优化算法调整这些长度,直到得到的轨迹在期望轨迹的公差范围内。
请阅读README.MD文件以开始。
使用上面的“从GitHub下载”按钮来获得与MATLAB最新版本兼容的文件。
使用下面的链接来获取与MATLAB早期版本兼容的文件。
R2020b:https://github.com/mathworks/simscape-multibody-four-bar-optim/archive/20.2.2.2.2.zip.
R2020a:https://github.com/mathworks/Simscape-Multibody-Four-Bar-Optim/archive/20.1.2.1.zip
R2019b:https://github.com/mathworks/simscape- multibody-four-bar-optim/archive/19.2.2.0.zip.
对于R2019A:https://github.com/mathworks/Simscape-Multibody-Four-Bar-Optim/archive/19.1.1.4.zip
R2018b:https://github.com/mathworks/Simscape-Multibody-Four-Bar-Optim/archive/18.2.1.3.zip
R2018a:https://github.com/mathworks/simscape- multibody-four-bar-optim/archive/18.1.2.zip.
R2017b:https://github.com/mathworks/Simscape-Multibody-Four-Bar-Optim/archive/17.2.1.1.zip
R2017a:https://github.com/mathworks/Simscape-Multibody-Four-Bar-Optim/archive/17.1.1.0.zip
了解如何使用Simscape Multibody来建模凸轮跟随机构:
//www.tianjin-qmedu.com/videos/modeling-contact-forces-in-a-cam-follower-94291.html
通过观看这个网络研讨会了解有关Simsceive Multibody的更多关于多体模拟的更多信息
//www.tianjin-qmedu.com/videos/multibody-simulation-with-simmechanics-81877.html
通过搜索关键字“物理建模”的帖子来查找其他Simscape示例
//www.tianjin-qmedu.com/matlabcentral/fileexchange/?term=%22physical+modeling%22
了解有关Mathworks Simscape产品的更多信息:s manbetx 845
//www.tianjin-qmedu.com/physical-modeling/
引用作为
史蒂夫•米勒(2021)。Simscape中的四杆机构优化GitHub (https://github.com/mathworks/Simscape-Multibody-Four-Bar-Optim/releases/tag/21.1.2.3)。检索.
Matlab释放兼容性
平台的兼容性
视窗 macOS Linux类别
标签
Scripts_Data
工作流/ Optim
工作流/测试
概述
您还可以从以下列表中选择一个网站: