第五章
这些是Elsevier的《模型预测控制的实际设计和应用》(电子书ISBN: 9780128139196,平装ISBN: 9780128139189)一书的第四章的文件。
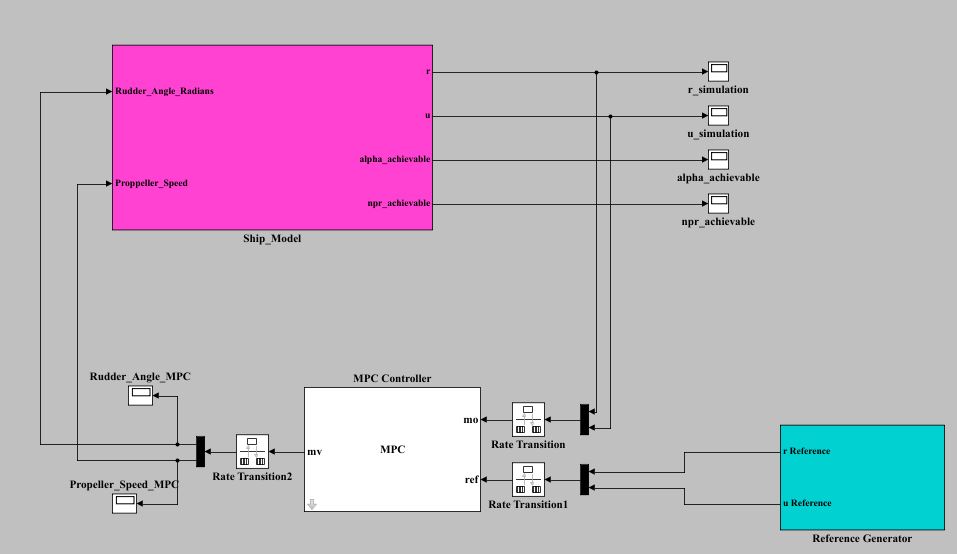
本章通过为船舶设计线性MPC控制器的过程指导用户。使用舵和螺旋桨控制转速和船速。这些执行器在物理限制下运行。
Simu万博1manbetxlink模型Chapter_5_Model_and_Reference。slx,用于船舶和控制器的参考可以在第5章/第3节中找到
船舶的线性模型,章节5_section_6_linear_model。可以在Chapter_5\Section_6中找到。
所设计的MPC控制器的会话可以在Chapter_5\Section_6中找到。负载MPCDesignTask_Chapter_5_Section_6。垫子和打开与MPC工具箱。
要查看MPC控制器的跟踪性能,请运行Chapter_5_Section_7_Model_and_Controller。slx可以在Chapter_5\Section_7中找到。模拟结束后,运行Chapter_5_Section_7_Script。根据要求绘制结果并显示控制器的性能。
章节5\Section_8包含了书中应用问题的解决方案。Chapter_5_Section_8_Model_and_Controller.slx运行。模拟结束后,运行Chapter_5_Section_8_Script。根据要求绘制结果并显示控制器的性能。
引用作为
纳西姆•哈立德(2021)。船舶单MPC设计-第5章(//www.tianjin-qmedu.com/matlabcentral/fileexchange/67827-single-mpc-design-of-a-ship-chapter-5), MATLAB中央文件交换。检索.