
78下载
更新2020年3月18日
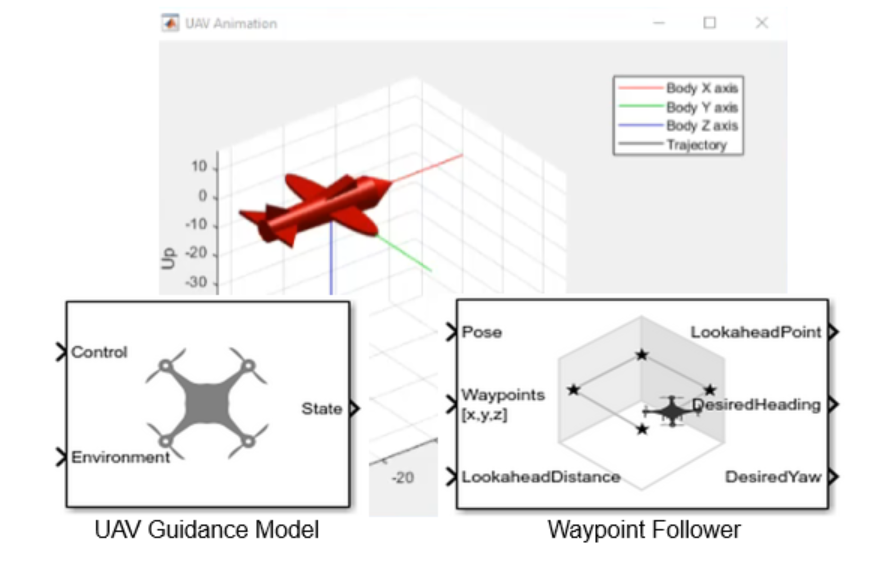
无人驾驶飞行器(无人机)可以使用UAV库进行建模和控制,用于机器人系统工具箱™功能,对象和块。您可以模拟固定翼和多转子UAV的缩小指导模型,该模型近似于具有运动模型的闭环自动孔控制器。使用给定功能生成控制命令,UV状态和环境输入。还提供了一种航点追随者以基于预定定义的航点执行飞行任务。
2019年的新品!您还可以通过UDP端口连接到Mavlink客户端,例如QgroundControl,以使用Mavlink通信协议将消息与UAV交换。
Robotics System Toolbox的UAV库包含以下参考示例:
•具有UAV指导模型块的近似高保真UAV模型
•针对固定翼UAV的调谐航点追随者
•使用Mavlink通信协议和加载特定的MAVLINK语句(新!)
评论和评级(17.)
Matlab释放兼容性
用R2018B创建
兼容R2018B至R2020A
平台兼容性
视窗 苹果系统 Linux.标签
您还可以从以下列表中选择一个网站:
陈启昌(查看资料)
我也找不到与库中的Mavlink通信协议相关的任何模型
Sanku Niu.(查看资料)
你好!对不起,我找不到与库中的mavlink通信协议相关的任何型号?有人可以帮帮我吗?谢谢!
Sanku Niu.(查看资料)
dujtep thawonsusin.(查看资料)
余阳吴(查看资料)
陈诚陈(查看资料)
卢卡桑托罗(查看资料)
非常好,但我有一个问题。
可以从用户输入更新航点列表?当无人机完成列表时等待另一个航点等。
谢谢大家
f(查看资料)
恩弗贝尔·洁白克(查看资料)
Ehab Safwat(查看资料)
迈克罗德夫(查看资料)
Lehua Hu(查看资料)
Yair Mazal.(查看资料)
anant arg.(查看资料)
Mihir Acharya(查看资料)
格雷格Drayer.(查看资料)
Satish Thokala.(查看资料)