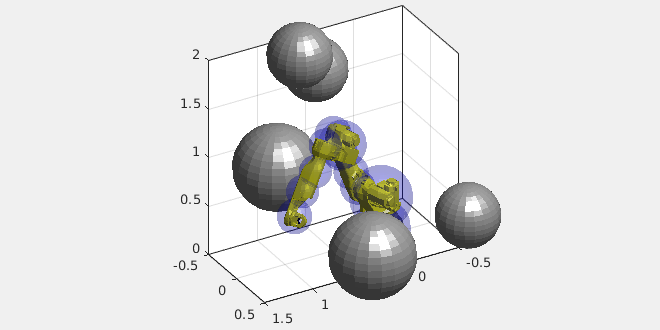
用数值方法求解机器人运动规划的最优控制问题。规划可以考虑运动学约束(如位置、速度、加速度、挺举边界)、动力学约束(如机器人刚体动力学包括重力、离心力和科里奥利力、惯性力、关节扭矩限制,甚至扭矩变动率限制)和避碰。解决时间在几秒钟内。
详情见出版物:“机器人运动规划的有效轨迹优化”,赵宇,林贤忠,Tomizuka Masayoshi, ICARCV 2018。
看到https://github.com/yzhao334/Efficient-Trajectory-Optimization-for-Robot-Motion-Planning--Examples获取可用的演示列表。
所需软件包:chebfun, CasADi。包中包含的其他依赖项(STLRead和STLWrite)
引用作为
Zhao, Yu, et al.“机器人运动规划的有效轨迹优化”。2018第十五届控制、自动化、机器人与视觉国际会议,IEEE, 2018, doi:10.1109/ ICARCV .2018.8581059。
赵昱(2021)。机器人运动规划的高效轨迹优化GitHub (https://github.com/yzhao334/Efficient-Trajectory-Optimization-for-Robot-Motion-Planning--Examples)。检索.
核心/ PseudoOpt
核心/跑龙套/机器人
核心/ STLRead跑龙套
核心/ STLWrite跑龙套
例子/ FromARTE / M20iA
例子/ M20-dyn-obstacle
例子/ M20-dyn-simple
例子/ M20-kin-obstacle
例子/ test-Wafer-3axis
例子/ test2D-dyn-obstacle
例子/ test2D-kin-obstacle
例子/ test2D-simple
核心/ STLRead跑龙套
要查看或报告这个GitHub插件中的问题,请访问GitHub库.
要查看或报告这个GitHub插件中的问题,请访问GitHub库.