这是一个简单的机器人工具箱,旨在研究和理解机器人操纵器的正运动学。
不像Peter Corke的工具箱,表示不是通过Denavit Hartenberg表示自动完成的,但齐次变换是由用户自行决定的,因此表示是由用户构建的。该特性能够表示并联机器人的运动学图,如发那科机器人中的平行四边形配置。
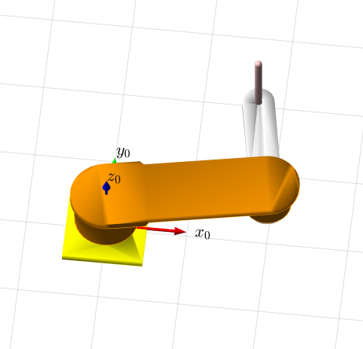
任何运动图的所有元素都可以用实体部件(三维框架、关节和连杆)来表示。实体链接需要STL文件。如果你不需要实体链接的表示,可以用简单的线条来表示。
工具箱需要下一个包含的补充工具箱/功能:
*《FreezeColors工具箱》,作者:John Iversen (2005)
*弗朗西斯·埃斯蒙德-怀特(2010)的Stlread和patchslim函数。
提供了几个使用这个工具箱的示例。
引用作为
凯萨查维斯(2021)。简单的机器人工具箱(//www.tianjin-qmedu.com/matlabcentral/fileexchange/80137-simple-robotics-toolbox), MATLAB中央文件交换。检索.
MATLAB版本兼容性
创建R2016b
兼容R2016b及后续版本