为C2000单片机生成优化的代码。
为Cortex-M处理器生成优化的代码。
为ARM Cortex-A处理器生成优化的代码。
为TI协奏曲生成优化的代码。

在Intel SoC平台上为ARM Cortex-A核生成代码。

这个工具箱使用户能够通过绿山软件的MULTI IDE在嵌入式处理器和模拟器上执行PIL测试。
用于ARM Cortex-A/ Cortex-M处理万博1manbetx器的嵌入式编码器支持包
为BeagleBone Black生成优化的代码。

为ARM Cortex-R处理器生成优化的代码

嵌入式Linux设备的设计、分析和原型
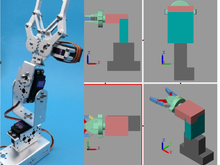
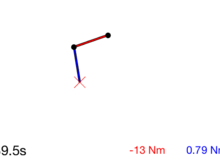
这是一个三维机械臂的Simscape模型

Arm Cortex-M Fast Models 万博1manbetxSupport Package for Embedded Coder。
为Cortex-M生成优化的DSP算法代码。
生成ARM Cortex-A优化的DSP算法代码。

控制和监控你的Kinova手臂

使用Kinect (Simulink Support For Kinect)和Arduin万博1manbet万博1manbetxxo的手势控制机械臂
版本1.0.0.0
Avinash Baranitharan这是一个Simuli万博1manbetxnk模型,通过使用Kinect传感器捕捉的手势来控制机械手臂。
点击并拖动以观察手臂的反应。包括注释良好的派生代码。
用于大力神RM48微处理器的嵌入式循环编码器处理器(PIL)目标

Matlab工具箱,用于寻找从摄像机到机械臂基地的转换

机器人手臂3d使用c
具有n倍频带,手臂和A和C加权滤波器
这是一个简单的例子模拟一个拟人化的手臂与3DOF。
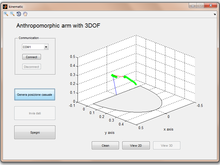
3自由度拟人手臂的逆运动学。
一个GUI控制六个伺服电机。
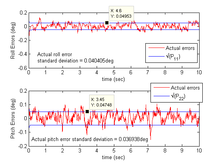
Unscented卡尔曼滤波教程:Simulink和倾斜传感器案例研究。万博1manbetx

找出每个轴关节的空间位置和角度。
计算了球面腕部六自由度拟人手臂的运动学逆解。