计算机视觉的工具箱
设计和测试的计算机视觉,3D视觉,视频处理系统

Computer Vision Toolbox™提供了用于设计和测试计算机视觉、3D视觉和视频处理系统的算法、函数和应用程序。您可以执行对象检测和跟踪,以及特征检测、提取和匹配。对于三维视觉,工具箱支持单,立体,和鱼眼相机校准;万博1manbetx立体视觉;三维重建;激光雷达和三维点云处理。计算机视觉应用程序自动地面真相标签和相机校准工作流程。
您可以使用深度学习和机器学习算法(如YOLO v2、Faster R-CNN和ACF)来训练自定义对象检测器。对于语义分割,可以使用深度学习算法,如SegNet、U-Net和DeepLab。经过预先训练的模型可以让您检测人脸、行人和其他常见对象。
您可以通过在多核处理器和GPU上运行它们加速你的算法。大多数工具箱算法支持C / C ++代码生成与现万博1manbetx有的代码,桌面原型和嵌入式视觉系统部署整合。
入门:

目标检测与识别
框架来训练,评估和部署对象检测器,例如YOLO V2,更快的R-CNN,ACF,和堇菜 - 琼斯。识别物体的能力包括视觉词和OCR袋。预训练的模型检测人脸,行人和其他常见的物体。

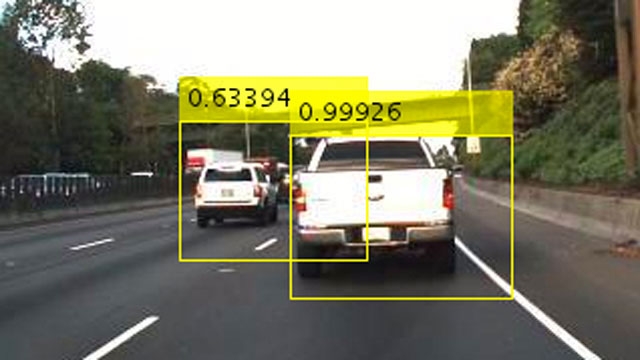
使用更快的R-CNN对象检测。


地面实况标签与贴标机的视频应用。


登记和缝合一系列点云。

分段激光雷达点云。

立体相机标定
校准立体声对,以计算深度和重构3D场景。

立体声相机校准器应用程序。

从运动多视点结构。

立体视差图表示相对深度。
特征检测、提取和匹配
检测,提取和匹配有趣的特性如斑点,边缘,以及跨多个图像的角落。

使用点特征检测,提取和匹配在杂乱场景检测的对象。
基于特征的图像配准
匹配在多个图像中的特征来估计图像和注册图像序列之间的几何变换。

用基于特征的注册创建全景图。

路线指示跟踪对象的轨迹。

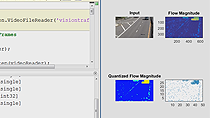
用固定摄像机探测移动的物体。
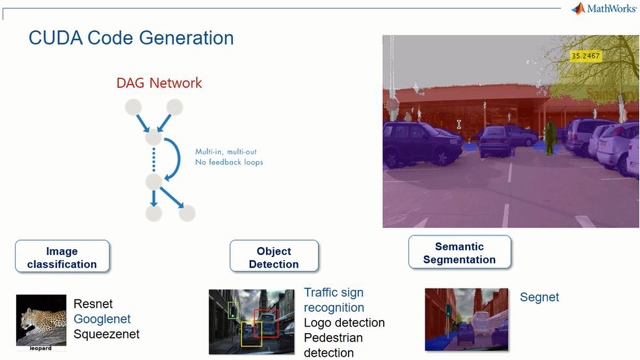
代码生成
为工具箱函数、类、系统对象和块生成C/ c++、CUDA代码和MEX函数。
点云深度学习
检测并在3-d点云对象分类
深度学习大图像
火车和使用深层学习对象探测器和语义分割网络上非常大的图像
同步定位和映射(SLAM)
进行点云和相机SLAM
条码读取器
检测和解码一维和二维条形码
SSD目标检测
使用单镜头多盒目标探测器(SSD)检测图像中的目标
看到发行说明了解这些特性和相应功能的详细信息。
