这场辩论已经持续了两个多星期。这是夏末2017年,九个本科工程专业的学生已经联手为他们在技术苏黎世的瑞士联邦理工学院(ETH苏黎世)的最终项目。他们已经同意斥资学年建设,可以迅速采取行动,在一个平面上,也爬楼梯的机器人。但他们不能在设计上达成一致。一些想法比其他排名靠前,其中包括坦克般的机器人用履带,并用机器人的两个变化风车状的车轮,它可以用推拉本身了楼梯。有了这些,学生们看到了更好的机会为设计,建造和运营工作的机器人。但是,每个设备有它的缺点,比如过于笨重或过慢或过于相似,已经由其他研究人员建立了一个机器人。
最具创新性的想法,一个带轮子而不是脚的双腿跳跃机器人,并不是最受欢迎的想法。每个人都能看到设计和编程这样一台机器有多么困难。他们必须克服许多工程和软件方面的挑战,才能使它在滚动时保持平衡,更不用说跳跃了。这似乎是不可能的。“我反对跳跃机器人,”机械工程系学生维克多·克莱姆(Victor Klemm)说,“要想在两个轮子上完成跳跃并恢复稳定性,机器人必须非常灵活,并拥有尖端的运动控制技术。”
突然,队员弗洛里安·韦伯开口了。机械工程系学生莱昂内尔·古利奇回忆道:“他说,‘伙计们,让我们试试跳一个,因为虽然它可能是最难的,但它是最酷的一个,这可能是我们生命中最后一次选择了。’”渐渐地,韦伯说服了一个又一个学生,直到每个人都上了船。
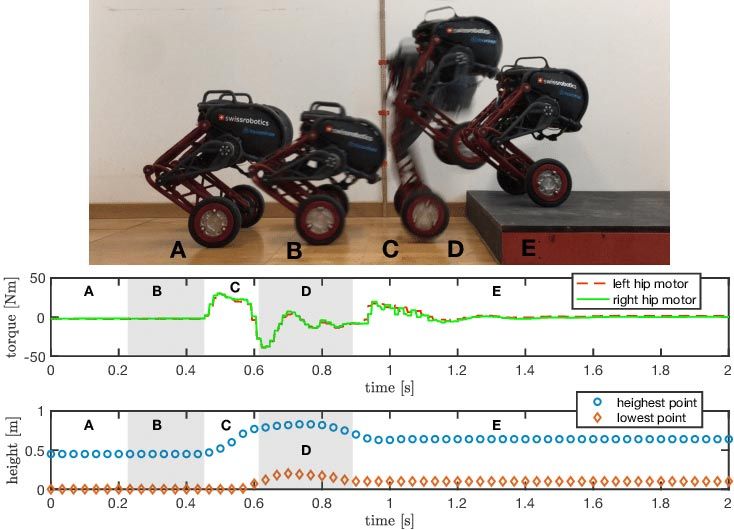
这一决定最终产生了重大影响阿森托,一个两足的、23磅重的机器人,能够在平坦的地形上以每小时5英里的速度滚动,并能垂直跳跃14英寸而不会摔倒。它可以跳过障碍物,慢慢地跳上一段楼梯。车载摄像头和传感器可以创建周围环境的3D地图,当与视觉和路径规划算法结合使用时,机器人可以自主驾驶。
“要在两个轮子上完成跳跃并恢复稳定性,机器人必须非常灵活,并具有尖端的运动控制技术。”
维克多·克莱姆,ETH Zürich大学机械工程系学生
振作起来
到9月开学时,九名工科学生已根据兴趣分成四个小组:电子、软件控制、建筑与设计、感知与计算机视觉。他们有五周时间制作一个原型,并在三次中间演示的第一次演示中展示他们的进展。使用可用的在ETHZ的办公室里,他们开始每天开会,勾勒出可以爬楼梯的机器人的想法。他们提出了20个概念,并使用MATLAB®为了评估基本动作,他们将其归纳为四种最可能的选择。从中,他们用纸板和乐高积木制作了粗糙的物理模型®块和创建的三维计算机辅助设计图纸。Ascento——早期由perception和计算机视觉团队成员尼古拉·昆格(Nicola Küng)提出的一个名字开始走到一起。
在几周的时间,学生们在手雄厚的设计,并能为3D打印的机器人的身体的第一个原型。

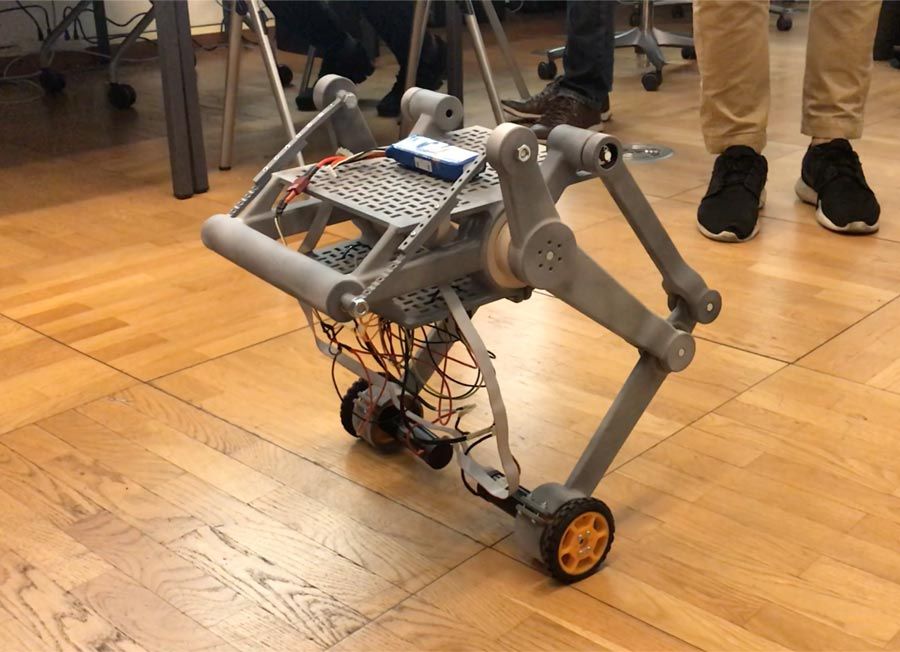
Ascento团队使用乐高积木和定制3D打印和激光切割组件来测试各种车轮和机器人设计。图片来源:ETHZ
在这些概念阶段,很明显,如果他们想要一个轻便、耐用的机器人,他们需要将船上的电机和电子设备保持在最低限度。学生们使用MATLAB中的优化工具,专注于一种不同寻常的腿部设计,这种设计使得每个髋关节中只有一个腿部电机成为可能。设计是这样的:每条腿都有一块小腿骨骼(在膝盖和轮子之间),但有两块股骨。其中一根股骨连接到机动髋关节和弹性膝关节以控制跳跃。另一根股骨与第一根股骨平行,连接到一个销关节和第二个膝关节,以在机器人驱动时稳定机器人。两个股骨的形状及其与小腿骨的连接类似于平行四边形。几周后,学生们手头上就有了一个坚实的设计,在建筑设计小组成员多米尼克·曼哈特(Dominik Mannhart)的大量帮助下,他们能够3D打印出机器人身体的第一个原型。
这是十月第一中间介绍截止笼罩。并成立Gulich队友马库斯Vierneisel,谁用克莱姆沿软件控制团队的成员,感到不得不让机器人来平衡它的轮子。他们清除车轮电机,传感器,和来自各地的大学等电子零部件,将它们添加到Ascento,并砍死在一起,保持了稳定的机器人,它慢慢地向前和向后移动的控制系统。这是一个重大的成就。在五个星期,他们从机器人的20个不同的草图去能够在其车轮平衡,而不翻倒的单一工作模式。
“这给人的印象很酷,”克莱姆说。队员们欣喜若狂。“但这也证明是一个陷阱,”他说。黑客攻击的平衡系统不足以容纳更快、更强大的电机,计算机控制系统Ascento最终需要在驱动和跳跃时保持稳定。下一次演讲安排在圣诞节前,前面的路比团队成员意识到的要长得多。
该团队使用了3D打印机打造Ascento机器人的第一个原型。图片来源:瑞士联邦理工学院
平衡法
因为物理控制着系统的动力学,让机器人正常工作是一个数学问题。克莱姆的任务是将物理系统转换成数学模型。为此,他利用各种结构元件的质量、运动部件的惯性和其他信息,在MATLAB中推导出描述理想机器人在理论上如何运动的方程。接下来,他将这些方程插入Simulink万博1manbetx®建立一个计算机模拟。在那里,他不仅跑了测试,让他更好地了解机器人的功能,而且还原型算法设计制作最佳的运动。在该模拟中,例如,使机器人保持本身从由第一感测其上的身体向前倾斜,然后加速其下体追赶前倒。
克莱姆说,一个人也会做同样的事情。“如果你站着,开始向前摔倒,你会向前迈一步以恢复平衡。”
该团队使用MATLAB和Simulink来调整平衡万博1manbetx算法,一旦他们在仿真中工作良好,就将调整后的参数转移到真正的Ascento机器人上。接近12月底,学生们在机器人的第二次迭代中安装了更好、更强大的电机和传感器。但每次他们进行测试时,机器人都会停止工作他们会对机械进行故障排除,在Simulink中重新测试控制算法,转换代码,然后重新安装到机器人上,结果会掉下来。这样持续了好几个星期。克莱姆说:“我们非常震惊。我们想,‘是的,我们有了新的硬件、电池、传感器,我们有了一台电脑,我们有了昂贵的马达,现在一切都应该比以前容易多了。’但恰恰相反,事实并非如此。
在第二次演示的截止日期前几天,包括克莱姆、古里奇、科伦丁·普菲斯特和亚历山德罗·莫拉在内的几名学生上了两班夜班,努力让机器人保持稳定。它就是不平衡。在演示当天,团队展示了他们的状态,并播放了机器人疯狂地来回摆动的短片。队员们感到失望,但决心坚定。一位朋友问克莱姆是否准备放弃。克莱姆说:“我告诉他,如果我不能在五月份之前达到平衡,我将放弃我的工程研究。”。
在该模拟中,例如,使机器人保持本身从由第一感测其上的身体向前倾斜,然后加速其下体追赶前倒。
一小跳
2018年春天,机器人团队取得了进展。他们实施了一项重大变革,这将提高他们的成功几率:他们停止使用USB端口向Ascento的电机发送命令,转而使用专为该任务设计的通信协议。该协议称为控制器局域网,是optimized适用于电机通信和高速。通过它,他们将发送到电机的命令数量从每秒20个增加到每秒400个。模拟没有错;信号到达电机的时间太长。这是许多学习时刻之一。古里奇说:“事后看来,使用USB端口是幼稚的。没有合适的工程师会这样做。”。
不过,即使有新的协议,他们无法得到机器人稳定。复活节的来临,随着第三呈现原定于两周。并成立Gulich一些队友走的节日。其他一些国家,包括克莱姆,住回继续Ascento工作。无法解决平衡问题,克莱姆和莫拉开始询问其他工程学生和教师的意见。一个博士学生,谁看了机器人下降的视频回顾了一些球队的数据说,他认为倾斜传感器看上去有些诡异。团队成员发现该选项已经没有调整平衡,这被扔反应时间关闭。他们进行了调整,20分钟内,机器人是稳定的。
克莱姆说:“这是一个非常棒的时刻。这只是一个设置,我们调整了它,它完美地平衡了。我们非常高兴。”。
离最终演示还有三个星期,他们还必须改进机器人的驾驶能力,使其保持坚如磐石的平衡,并让机器人跳跃。控制小组开始轮班,只睡了六个小时就返回工作岗位。两名小组成员将花一天的时间尽可能多地取得进展然后把它交给下一队。他们让机器人跳了起来,但着陆时有岩石。在一个学生抓住它之前,它几乎要掉下来了。
它继续这样的日子。直到一个夜晚,同时克莱姆和睡成立Gulich,团队成员包括Vierneisel和西罗萨尔兹曼,得到了机器人正视跳和土地。醒来成立Gulich到它自己的手机上的视频。在球队每个人都赶到办公室看到它自己。他们开了一瓶香槟,他们会在冰箱里了,因为该项目的第一个星期。
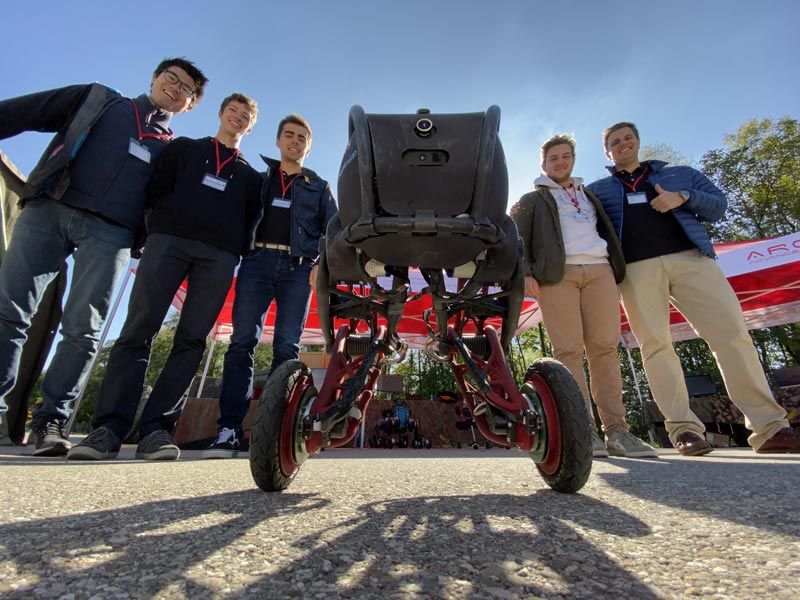
Ascento与现有团队成员,从左至右依次为多米尼克·曼哈特、西罗·萨尔兹曼、亚历山德罗·莫拉、莱昂内尔·古里奇和维克多·克莱姆。图片来源:ETHZ
“[跳跃机器人]是所有想法中最酷的,现在已经过去两年了,我们仍然绝对热爱轮子、腿和跳跃技术。”
莱昂内尔·古里奇,ETH Zürich的机械工程专业学生
当Klemm和Gulich回顾他们的经历时,他们都说他们很高兴选择了最难的机器人。“这是所有想法中最酷的一个,现在已经两年过去了,我们仍然绝对热爱轮子、腿和跳跃的技术,”古里奇说。
克莱姆说,如果他们会选择一个更简单的机器人,他们就会有成品两年前就都去他们分开的方式。虽然它可以很容易地跳到楼梯的高度,它需要一个滚动发车。他们希望加快这件事。九名学生的五期间他们的研究生留校继续细化Ascento。所有这些都集中他们的大学研究的一些部分围绕机器人的技术方面,发表了两篇学术论文,并在会议和活动的少数呈现。
该团队将机器人视为一个可定制的平台,可以支持一系列传感器,如热摄像头、麦克风、激光扫描仪或化学传感器,这些传感器可以根据万博1manbetx工业需要进行更换。例如,紧凑型机器人可以检查仓库库存,查找工业区的化学泄漏,或绘制新的污染地图它甚至可以搜索灾区寻找幸存者。他们希望在三个月内准备好的下一个版本的Ascento将更接近于这个理想的最终产品。
对克莱姆来说,那一天将是苦乐参半的。“有这么多事情要做,这是一个非常有趣的系统,”他说。“我不想让它结束。”