使用模型预测控制的自动驾驶
模型预测控制(MPC)是一种离散时间多变量控制体系。在每个控制区间,MPC控制器使用一个内部模型来预测未来的植物行为。基于这种预测,控制器计算最优控制动作。有关模型预测控制的更多信息,请参见MPC设计.
你可以在自动驾驶应用中使用MPC来提高车辆的响应能力,同时保持乘客的舒适性和安全性。应用程序可以包括:
自适应巡航控制-例如,请参阅基于模型预测控制的自适应巡航控制系统.
保持车道辅助-例如,请参见基于模型预测控制的车道保持辅助系统.
车道跟随控制—有关示例,请参见基于传感器融合和车道检测的车道跟踪控制.
停车—示例请参见基于非线性模型预测控制的并行泊车.
避障-例如,请参阅基于自适应模型预测控制的避障.
MPC有几个对自动驾驶有用的功能。
| MPC特性 | 描述 | 更多的信息 |
|---|---|---|
| 显式地处理输入和输出约束 | 当计算最优控制移动时,MPC控制器考虑系统上的任何输入和输出约束。例如,您可以为:
|
|
| 预测在一个渐行渐远的地平线上的自我载体行为 | MPC控制器使用车辆动力学的内部模型来预测车辆在预测范围内对给定控制动作的反应。这种行为类似于人类驾驶员理解和预测车辆的行为。 | |
| 预测基准线轨迹和干扰 | 如果你能预测预测水平线上的参考轨迹或干扰,MPC控制器可以在计算最优控制动作时结合这些信息。这种行为类似于人类驾驶员在车辆前方预视道路。 | 信号预览 |
| 在运行时更新内部车型 | 如果自我汽车的动力学随时间变化,例如速度依赖的转向动力学,您可以使用自适应MPC更新控制器内部模型。 | 自适应政策委员会 |
| 生成代码 | 您可以自动生成用于部署模型预测控制器的代码。 | 生成代码并部署控制器到实时目标 |
模拟在万博1manbetx
为了简化自动驾驶控制器的初始开发,Model Predictive Control Toolbox™软件提供了Simulink万博1manbetx®块自适应巡航控制,车道保持协助,和路径跟随。这些块为设计MPC控制器提供了特定于应用程序的接口和选项。
| 块 | 描述 |
|---|---|
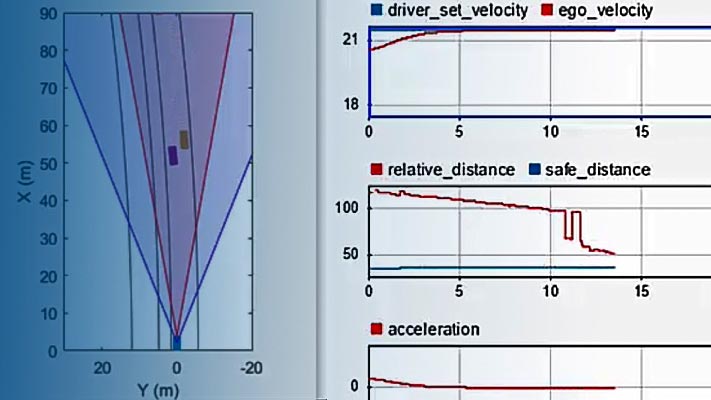
| 自适应巡航控制系统 | 通过调整自我车的纵向加速度,跟踪设定的速度并保持与领先车辆的安全距离。 |
| 车道保持辅助系统 | 调整前轮转向角度,使车辆在直线或弯曲道路中心行驶。 |
| 路径跟踪控制系统 | 保持自我车辆在直线或弯曲道路的中心行驶,同时保持一定的速度和与领先车辆保持安全距离。为此,控制器同时调整自我汽车的纵向加速度和前转向角度。 |
对于其他自动驾驶应用程序,如避障,您可以使用其他模型预测控制Simulink块设计和模拟控制器,例如万博1manbetxMPC控制器,自适应MPC控制器,非线性MPC控制器块。有关使用自适应模型预测控制器的示例,请参见基于自适应模型预测控制的避障.
控制器定制
为自适应巡航控制系统,车道保持辅助系统,路径跟踪控制系统块,您可以生成一个定制子系统,然后您可以为您的应用程序修改它。当你想:
修改默认MPC设置或使用高级MPC特性
修改控制器默认初始条件
使用不同的应用程序设置,例如自定义安全跟随距离定义自适应巡航控制
要创建一个自定义子系统,请单击您正在使用的块的对应按钮。例如,要为自适应巡航控制系统块,块选项卡上,单击创建ACC子系统.该软件创建一个Simulink模型,其中包含一万博1manbetx个子系统,该子系统具有与原始控制器相同的配置。您可以修改这个子系统,并直接将其替换回您的原始模型,替换控制器块。
集成自动驾驶的工具箱
如果你有自动驾驶工具箱™软件,你可以将模型预测控制器与以下系统集成:
目标检测与跟踪
车道边界检测
路径规划
传感器融合
有关示例,请参见:基于传感器融合的自适应巡航控制,车道保持协助车道检测,基于传感器融合和车道检测的车道跟踪控制.
另请参阅
块
您也可以从以下列表中选择一个网站: