传感器融合和跟踪工具箱
设计、模拟和测试多传感器跟踪和定位系统
传感器融合和跟踪工具箱™包括用于设计、模拟和测试系统的算法和工具,该系统融合来自多个传感器的数据,以保持态势感知和定位。参考例子为监视和自主系统的多目标跟踪和传感器融合发展提供了起点,包括机载、星载、地基、舰载和水下系统。
你可以融合来自真实世界传感器的数据,包括主动和被动雷达、声纳、激光雷达、EO/IR、IMU和GPS。您还可以从虚拟传感器生成合成数据,以在不同的场景下测试算法。工具箱包括多目标跟踪器和估计过滤器,用于评估结合网格级、检测级和目标或轨迹级融合的架构。它还提供了度量标准,包括OSPA和GOSPA,用于根据地面真实场景验证性能。
对于模拟加速或快速原型,工具箱支持C代码生成。万博1manbetx
开始:


空域监视
利用雷达、ADS-B和EO/IR等主动和被动传感器的数据跟踪多个目标。自定义跟踪器来处理机动对象。
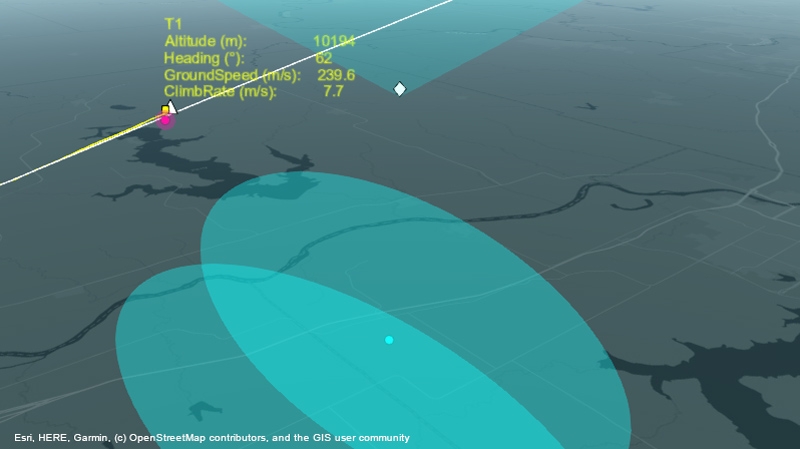
跟踪以地球为中心的飞机。

利用开普勒运动模型跟踪空间碎片。
单传感器跟踪
对多目标跟踪器进行建模和仿真,以执行智能传感器所需的处理。这包括将原始数据转换为对象轨迹列表。
集中融合
使用集中式跟踪器跟踪扩展对象,该跟踪器融合了来自多个传感器和传感器模式的数据。使用概率假设密度(PHD)跟踪器估计移动对象的运动学以及对象的尺寸和方向。对于复杂的城市环境,实施基于随机有限集(RFS)网格的跟踪器,以跟踪每个网格单元的占用情况及其运动学。
Track-Level融合
融合来自多个跟踪源的轨迹,以提供更全面的环境评估。评估具有带宽限制的系统和采用谣言控制以消除陈旧结果的系统中的迹对迹融合架构。
估计过滤器和数据关联
使用丰富的估计滤波器库估计对象状态,包括线性和非线性卡尔曼滤波器、多模态滤波器和粒子滤波器。找到2D分配问题或S-D分配问题的最佳或k-最佳解决方案。将检测分配给检测、将检测分配给轨迹或将轨迹分配给轨迹。万博 尤文图斯

非高斯滤波器的仅距离跟踪。
多目标跟踪器
将估计过滤器、分配算法和跟踪管理逻辑集成到多目标跟踪器中,将检测融合到跟踪中。将您的传感器数据转换为检测格式,并使用全球最近邻(GNN)跟踪简单的场景。可以轻松切换到联合概率数据关联跟踪器(JPDA)、多假设跟踪器(MHT)或PHD跟踪器,以应对一些具有挑战性的场景,如跟踪测量存在模糊的近距离目标。
基于扩展对象和网格的跟踪器
使用PHD跟踪器跟踪扩展对象的运动学、大小和方向。使用高分辨率传感器数据(如激光雷达和雷达点云),使用基于栅格的RFS跟踪器进行跟踪,以估计复杂城市环境中栅格单元的动态特性。
Track-Level融合
由跟踪传感器或其他跟踪融合对象生成的融合轨迹。设计带宽受限系统中的分散跟踪系统。减少谣言传播,消除陈旧的跟踪结果。
融合体系结构
探索跟踪体系结构并评估跟踪到跟踪融合、中央级跟踪或混合跟踪体系结构之间的设计权衡。使用静态(探测)融合来结合仅角度和仅距离传感器的探测,如IR, ESM,或双基地雷达。
使用分布式同步无源传感器进行跟踪。
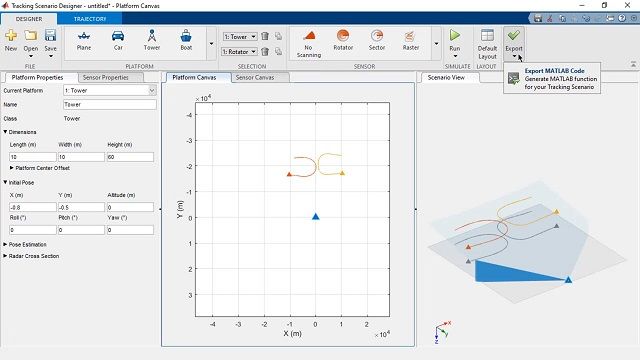
物体轨迹和姿态生成
使用Tracking Scenario Designer应用程序以交互方式定义场景,并生成MATLAB脚本,用于定义和转换不同参考帧中对象的真实位置、速度和方向。
主动和被动传感器模型
对主动传感器(包括雷达、声纳和激光雷达)进行建模,以产生对目标的检测。模拟方位角、仰角或两者的机械和电子扫描。模拟雷达警报接收器(RWR)、电子支援措施(ESM)、被动声纳和红外传感器,以生成仅用于跟踪场景的角度检测。用发射器和传感器模拟多基地雷达和声纳系统。万博1manbetx
蒙特卡罗模拟
使用不同的随机噪声值进行蒙特卡罗模拟。干扰地面真实值和传感器配置,以增加测试的稳健性。
INS传感器模型
模型惯性测量单元(IMU)、GPS、高度计和INS传感器。调整环境参数,例如模型的温度和噪波特性,以模拟真实环境。

建立IMU和GPS传感器模型,测试惯性融合算法。
定位估计
融合加速度计和磁强计读数,以模拟电子罗盘(eCompass)。将加速度计、陀螺仪和磁强计读数与姿态和航向参考系统(AHRS)滤波器融合,以估计方向。
姿态估计
使用惯性传感器和GPS估计有或没有非完整航向约束的姿态。通过将惯性传感器与高度表或视觉里程计融合,确定没有GPS的姿态。

使用融合IMU和摄像头数据的视觉惯性里程计。
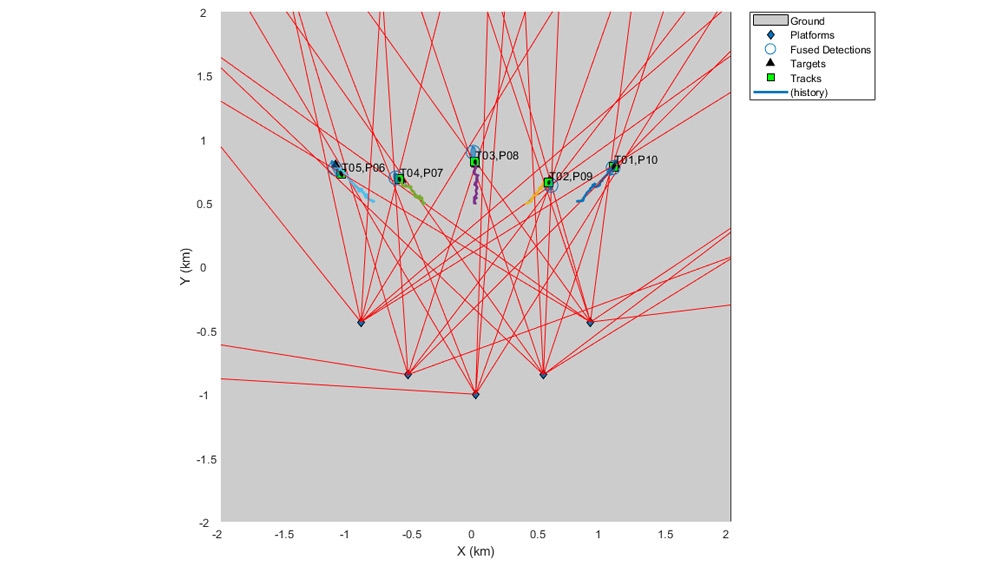
场景可视化
在3D中绘制对象的方向和速度、地面真实轨迹、传感器测量和轨迹。绘图检测和跟踪不确定性。可视化带有历史轨迹的轨迹ID。

多平台场景的剧场情节。
传感器和跟踪度量
生成轨道建立、维护和删除指标,包括轨道长度、轨道中断和轨道ID交换。使用位置、速度、加速度和横摆率均方根误差(RMSE)或平均归一化估计误差平方(ANEES)估计航迹精度。使用综合OSPA和GOSPA指标,以单个分数总结绩效。利用Allan方差分析惯性传感器噪声。
优化过滤器和跟踪器
调整多对象跟踪器的参数,如分配阈值、过滤器初始化功能以及确认和删除阈值,以最大限度地提高性能。比较不同跟踪器和跟踪器配置的结果。自动调整INS滤波器以优化噪声参数。
代码生成
生成C/C++和MEX代码,用于使用MATLAB编码器™。应用成本计算阈值以减少用于计算分配成本的时间。