基于MATLAB和Simulink的自动驾驶万博1manbetx
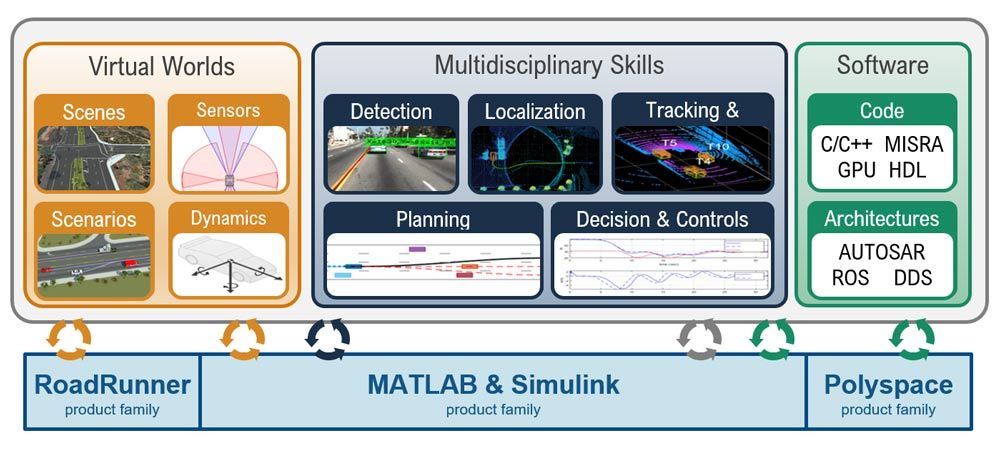
MATLAB®,S万博1manbetximulink®,和RoadRunner通过让工程师深入了解真实世界的行为、减少车辆测试和验证嵌入式软件的功能,推进了自动驾驶感知、规划和控制系统的设计。使用MATLAB和Simulink,您可以:万博1manbetx
- 访问、可视化和标记数据
- 驾驶模拟场景
- 设计规划和控制算法
- 设计感知算法
- 使用代码生成部署算法
- 集成和测试
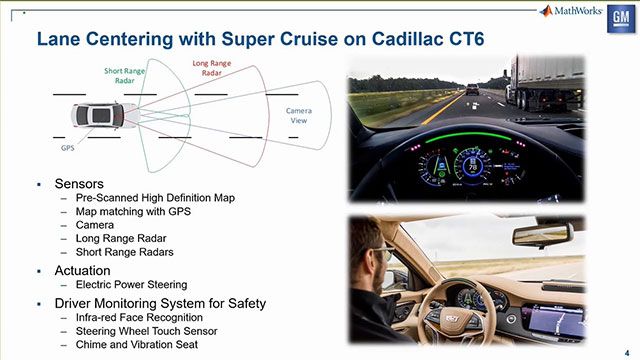
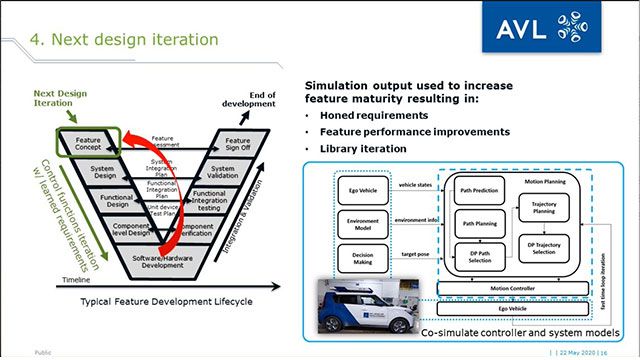
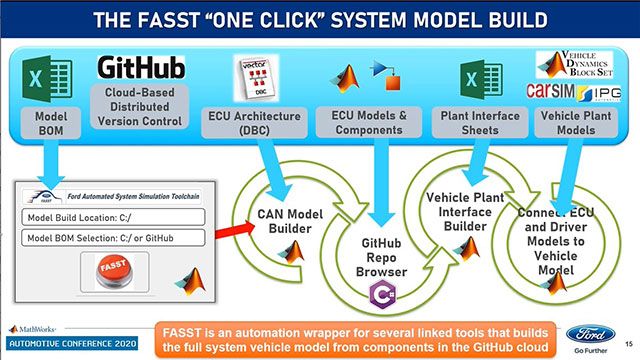
了解其他人如何使用MATLAB和Simulink进行自动驾驶万博1manbetx




模拟驾驶场景
可以使用长方体和长方体虚幻引擎®使用MATLAB开发和测试虚拟场景中的算法的仿真环境。
长方体环境将参与者表示为简单的图形,并使用概率传感器模型。您可以使用此环境进行控制、传感器融合和运动规划。
使用虚幻引擎环境,您可以开发感知算法和长方体环境用例。RoadRunner让您设计场景使用模拟器,包括卡拉,Vires VTD,和NVIDIA驱动器Sim®,以及MATLAB和Simulink。RoadR万博1manbetxunner还支持导出为FBX等行业标准文件格式万博1manbetx®和OpenDRIVE®.


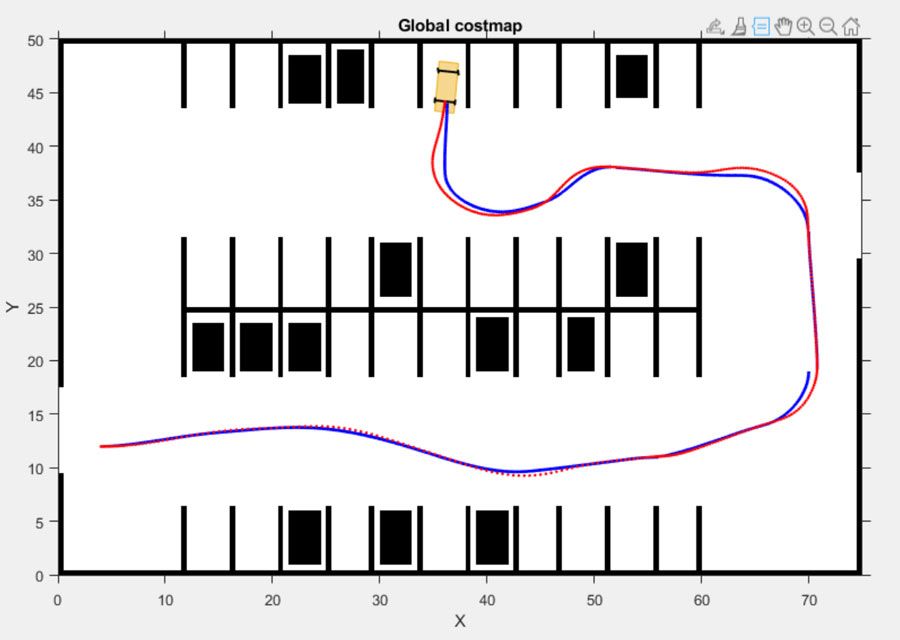
设计规划和控制算法
使用MATLAB和Simulink万博1manbetx,可以开发路径规划和控制算法。您可以使用横向和纵向控制器设计车辆控制系统,使自动驾驶车辆能够遵循计划的轨迹。
您还可以使用传感器模型和车辆动力学模型以及二维和三维仿真环境综合测试算法。
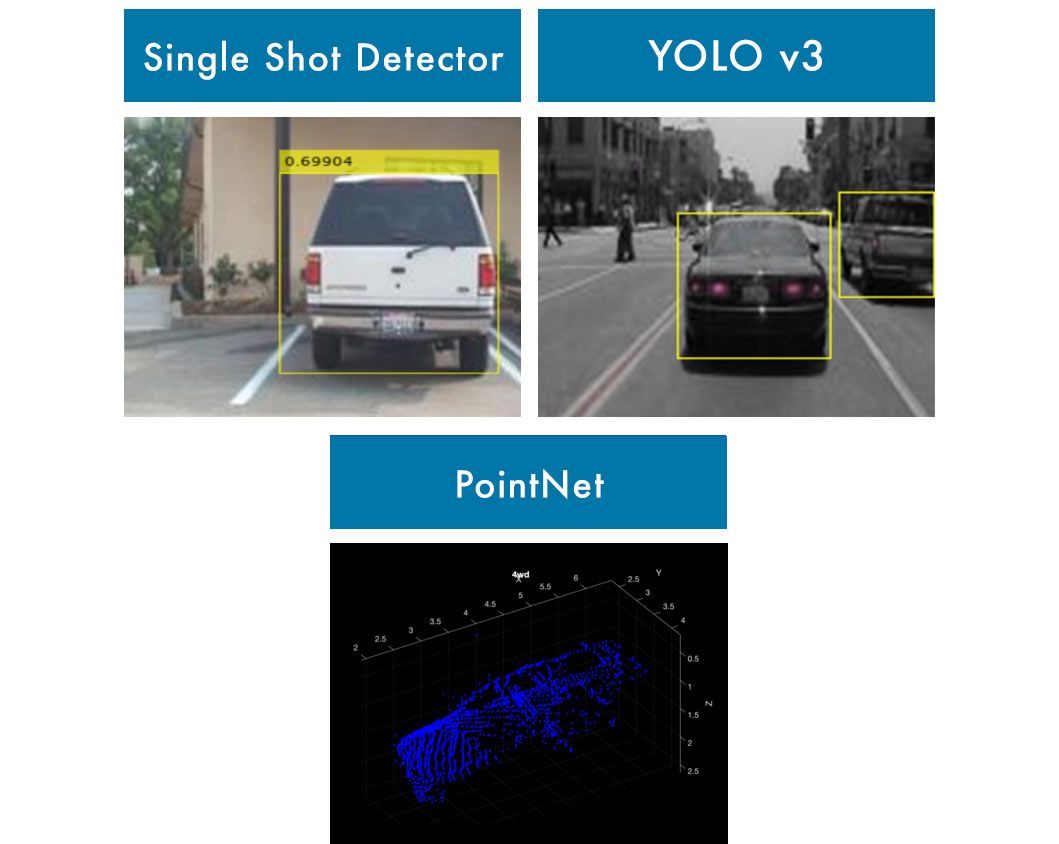
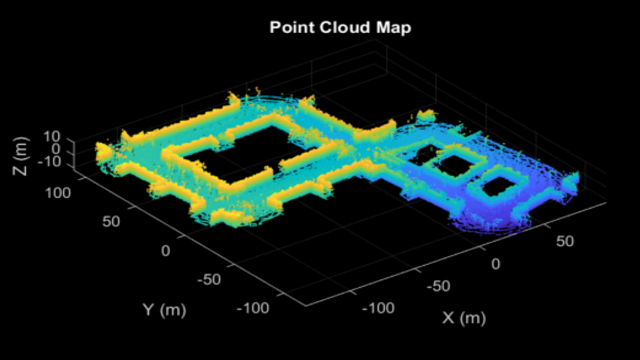
设计感知算法
您可以使用来自照相机、激光雷达和雷达的数据开发感知算法。感知算法包括检测、跟踪和定位,可用于自动制动、转向、地图生成和里程计等应用。
您可以将这些算法作为ADAS应用程序(如紧急制动和转向)的一部分来实现。
使用MATLAB,您可以开发传感器融合、同步定位和映射(SLAM)、地图构建和里程计的算法。
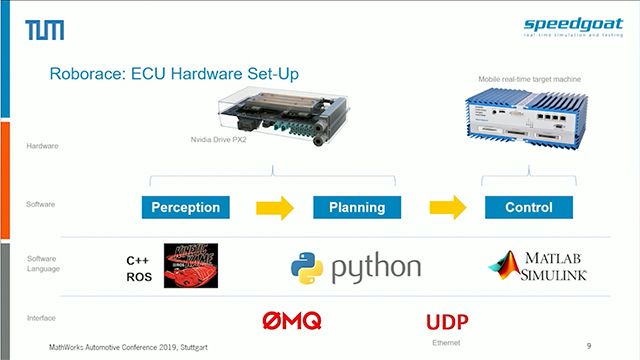
部署算法
您可以使用代码生成工作流将感知、规划和控制算法部署到硬件。支持的代码生成语言包括C、C++、CUDA万博1manbetx®,Verilog®,硬件描述语言(VHDL)®.
您还可以将算法部署到面向服务的体系结构,如ROS和AUTOSAR。
使用自动生成的代码,您可以将传感器与其他ECU部件连接。支持多个部署目标,包括来自NVIDIA和Intel的硬件万博1manbetx®臂®,等等。

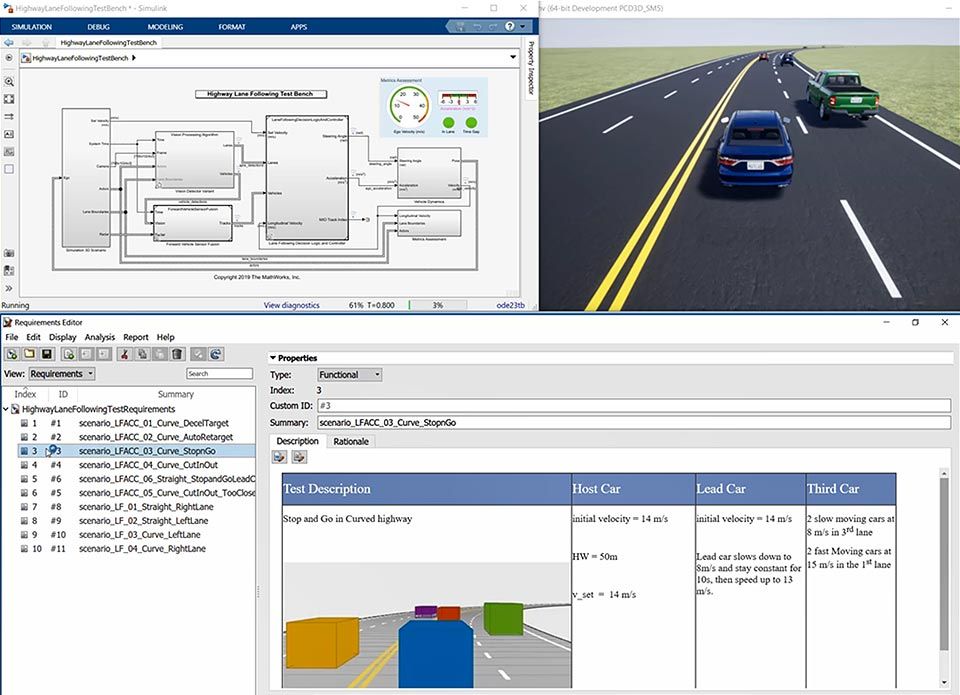
集成测试
您可以集成和测试您的感知、规划和控制系统。使用Simulink需求™, 您可以捕获和管理您的需求。您还可以使用Simulink测试™ 并行运行和自动化测试用例。万博1manbetx

让我们知道我们可以如何帮助你。
联系我们进行定制评估,并根据您的需要获取定价。

有问题吗?
与自动驾驶专家交谈。