早上好,下午好,晚上好,无论你在哪里参加这次网络研讨会。大家好,我来自芬兰。正如Joris所介绍的,我的名字是Mehmet Yagci,今天,我将谈论并分享我关于控制性能监视的经验。在我演讲之前,我想感谢MathWorks团队的所有人。正是他们让这次网络研讨会成为可能。在开始演讲之前,我想感谢大家。
所以今天,我们将讨论一个应用项目,这个项目也在我的硕士论文中研究过,并在几年前应用于一家炼油厂。但为了澄清这背后的故事,首先,我想简短地再次介绍一下我自己。目前,我在NAPCON担任首席过程控制工程师,NAPCON实际上是Neste Engineering Solutions的一部分。万博 尤文图斯从我加入NAPCON到现在已经快七个月了。
在此之前,我曾在土耳其炼油厂担任建模和过程控制研发团队负责人近7年。在那里,我还完成了我的硕士论文。论文课题是今天的控制绩效评估。我们为我之前的公司开发了一个应用程序。所以今天的网络研讨会将涵盖我在硕士论文项目期间的经历,这也与我以前的雇主有重叠。
你们中的一些人可能已经意识到我在社交媒体平台上有两个不同的名字。这主要是因为我同时拥有土耳其和保加利亚的双重国籍。事实上,我出生在保加利亚。但直到现在,我的生活都是在土耳其度过的。总之,我把我的LinkedIn信息放在了左下角。所以,如果你想讨论更多的问题,可以通过领英联系我。
在进一步讨论之前,我想简单介绍一下我现在的公司NAPCON。NAPCON实际上是Neste工程解决方案的一个业务部门。万博 尤文图斯Neste工程解决方案也是Neste的一部分万博 尤文图斯,Neste是全球可再生燃料的领导者之一。在NAPCON,我们有超过95名专业人员在不同的产品系列中工作。截至目前,已向11个国家的不同行业交付了170个应用程序。我应该说NAPCON是一个重要的组织,因为它从1986年就开始运作了。
因此NAPCON的业务领域可以分为三个子类别。Improve是我们提供先进过程控制和不同优化解决方案的产品系列。万博 尤文图斯Train是我们为流程和操作员培训开发模拟器的产品系列。最后,在Understand产品系列中,我们有先进的分析解决方案,能够分析过程数据,并将其作为视觉效果交付给领域专家检查。万博 尤文图斯所以每个类别实际上都带来了一些软件解决方案和一些咨询服务。万博 尤文图斯
所以今天,我们的议程是这样的。所以我喜欢这种表达想法的方式,我们先问自己一些问题,然后同时试着回答它们。但由于时间有限,实际上,我们没有机会触及控制绩效评估的所有理念或应用。但是今天,我们将试着给出一些大概的概念。我们会试着在这段旅程中分享一些技巧和技巧——比如说,在这种应用程序中,你可以,或者你有什么样的技巧和技巧。
让我们从最基本的问题开始。那么为什么需要控制绩效评估呢?我想今天网络研讨会的大多数与会者都对过程控制很有经验。但实际上,我想从过程控制的基本知识开始。
所以如果你有一个工艺,你希望你的工艺是安全的,可持续的,可靠的,低成本的,能够生产符合规格的产品和高度的灵活性,你当然必须有一个过程控制系统来确保你实际上满足这些需求。s manbetx 845如果你有一个过程控制系统,这意味着你的控制系统中有很多组件,比如变送器,传感器,执行器,控制器,等等。但这是很自然的现象,你拥有的组件越多,你维护这些组件所需的努力就越多。
但是,好的,如果我们讨论过程控制,我还想展示这个著名的控制层次图。实际上,这显示了我们在典型的控制系统中有什么样的控制层,以及它们如何相互通信,这样我们就可以更好地理解为什么实际上需要控制性能。
正如你所看到的,实际上,它从现场设备开始,像阀门,变送器,在底部,然后上升到管理层。在管理层,你有一些商业目标。当你在不同层面移动时,这些目标会转化为控制目标。
这意味着在每一层中,你都必须拥有一个完善的系统去翻译即将到来的目标。通常情况下,过程工业更关注复杂的系统比如高级过程控制和其他紧张而有益的控制系统比如实时优化器等等。
然而,我们大多忘记了控制系统,实际上,将这些系统的结果直接转化为现场,是基础层控制或调节控制,正如你在图的底部看到的那样。在当今世界,实际上我们知道工业中几乎95%的控制器都是基本的PID控制器。这实际上是和场有直接联系的。
因此,如果我们在讨论优化流程,我们需要确保我们有一个表现良好的基础层控制。说到基础层控制,我想展示这个简单的反馈控制循环它展示了一个典型的反馈控制循环中的组件。但我们将在接下来的幻灯片中回到这一点。
在这一点上,你可能会问,好的控制和坏的控制有什么区别?所以答案其实很简单。左边的趋势显示了一个变化很大的过程。把极限看作是生产能力。你越利用你的容量,实际上你得到的吞吐量就越大。
如果你的控制不好,这意味着大多数时候,你离最大吞吐量还很远。甚至有时,你超过了限制,这可能会导致一些可靠性问题在你的过程控制环或在你的单位,比如说。
另一方面,如果你提高你的控制系统的性能,你就会有更少的变化。然后你可以将你的过程转向极限,这样你就可以获得更多的吞吐量,或者你可以增加更多,从中受益更多。换句话说,如果您提高了控制性能,您将减少所有这些方面的变化——控制错误、过程输出、控制动作以及所需的维护操作。
当然,这些好处都转化为数字。所以我想和大家分享一些一般的和平均的统计数据,以便大家更好地理解绩效考核的好处。调查表明,每个控制工程师——顺便说一下,这些是平均数字。但是一个工厂里的每个控制工程师负责450个控制回路,这是一个非常高的数字。
当然,还有更多的问题,但是控制循环中面临的问题主要有7种类型。它们基本上是一些硬件问题,比如需要现场维护的控制阀问题,还有一些软问题,比如说,你只需要坐在你的控制系统前就可以解决问题,比如这些调谐问题。
此外,据观察,每个控制回路都需要一个小时的调查,以查明它是否有问题。今天的大多数行业在监管层上都有不同的高级过程控制层。所以我们需要记住,25%的APC收益来自监管控制方面。
当然,这取决于流程和你所在的行业。但这也是一个平均值。所以如果你提高了控制器的性能,你就能省下1万美元。顺便说一下,这是一个平均值。根据条件的不同,你可能会有更多或更少的。
所以我还想展示另一个图,它展示了高效维护的好处。在没有维护的情况下,假设只有基本的监控,在一段时间内,你失去了控制器的好处因为在你的控制器开始退化的时间内,它们失去了它们的性能。
好的,到目前为止,我认为我们已经讨论了足够多的好处和需求关于我们如何评估控制性能。这是下一个问题。通常情况下,我们说,在性能监控过程中主要有五个步骤。所以我想简要介绍一下它们。
第一步也是最重要的一步是收集数据。所以,你需要存储尽可能多的数据。但也有一些必须的和最好的。因此,传感器读数、设定值和控制器输出对于性能监控至关重要。但如果你收集了更多的变量,比如控制模式、调优参数和操作符动作,你可能会获得更多关于控制器性能的信息。
第二步是衡量步骤,您需要选择或定义一个基准来比较您的性能。因此,在这一步中,您可能需要收集一些先前的信息,如流程列表。但我们将在接下来的幻灯片中回到这个问题。
第三步是识别步骤。在这一步中,你会根据控制器的性能对它们进行排名。您应该突出表现较差的组件,以优先考虑维护工作。在那里,您还可以根据您计算的kpi创建一些警报,创建一些通知,或创建一些定期报告,以查看最佳性能,以便您可以有效地分配维护资源。
第四步是诊断步骤。在这一步中,您只需精确地指出表现不佳背后的原因。实际上,你需要为每个问题选择正确的识别方法,或者说是方法。但是如果在文献中没有可用的方法,或者在其他地方,你可以开发自己的识别方法来诊断根本原因。
第五步也是最后一步是建议和维护步骤。所以在这一步,你只是给过程控制工程师一些建议,以简化他们的决策过程。在那里,你也可以——我的意思是,你甚至可以自动化一些维护操作,比如把一些优化参数的最优值直接推给你的控制系统。这也是可能的。
现在,你可能会说,好吧,绩效评估的过程似乎很乏味。事实上,在某种程度上这是对的。但有一些非常基本和非常简单的统计指标,你可以避免一些复杂的计算。最基本的是均值和标准差。
通常情况下,控制器会尽量减小控制误差。理想情况下,均值和标准差都是0。但在理想情况下,由于一些测量噪声或一些直接影响控制回路的干扰,这是不可能的。
我们可以看一些例子。所以左边的过程比右边的过程有更高的均值和标准差,这意味着它的性能比右边的要差因为它的控制误差,控制器误差的均值和标准差比右边的图要高。
但这里需要注意的一点是,实际上,您不应该只看单个指标,而是应该获得它们的趋势,这样您就可以确定随着时间的推移可能出现的退化。有时候,单一的指标是没有意义的,比如说控制器的控制误差或者标准偏差。所以你需要在一段时间内观察这些值,看看你的控制性能是否在下降。
您可能还记得在数据收集步骤中有一些不错的东西。所以控制模式就是其中之一。计算起来很简单,但信息量很大。所以在这里,你可以看到左边的性能,实际上,左边的进程在控制器的生命周期中有30%的时间是手动的,而右边的进程完全处于自动模式。我的意思是,通过简单的数据收集,也可以看到你的控制器的性能。
但是,也有可能驱动一些,更先进的技术。事实上,它们并不先进,而是一些基本统计指标的推导。一个例子是控制误差和控制输出的标准差之比,实际上,它显示了控制器误差的变化有多少是由控制输出引起的。
所以数值越低,控制阀出现问题的可能性就越大。这又是一个工业上的例子。左边的工艺标准偏差比较低,从中我们可以怀疑那里有一些控制阀的问题。
实际上,如果您想在性能方面进行更多的研究,最好的选择是使用基准测试。在文献中,有不同的基准,如完美控制,最小方差控制,最佳PID,最佳可能PID,或开环控制。所以这取决于你的系统中有什么样的控制目标。
但简单地说,你需要做的是,计算控制器的性能,只是计算——基准计算的指数和实际控制器计算的指数的除法。
在这些基准中,最流行的是最小方差控制。1970年,阿斯特罗姆首次提出将其作为一种控制器来尽量减少过程变化。但在1989年,哈里斯提出了用最小方差控制作为控制器基准的想法。
就像我们几秒钟前讨论过的,你需要做的是比较理论基准控制器和实际控制器的指数。这里,对于最小方差控制,它是方差,这个指标。这意味着比值越小,控制器就越差。因为索引实际上是在0和1之间,所以这也让你更容易比较不同的控制器。
但你可以说,实际控制器的方差很容易计算。那么MVC控制器和MVC控制器的方差呢?实际上,如果你知道如何用自回归模型估计你的过程,这也很简单。这背后有更多的理论,但简单地使用MVC控制器,你能达到的最小方差是你创建AR模型后的过程噪声,自回归模型。
然后用AR模型对过程建模,残差的方差就变成了控制器的最小方差。而且,你们还记得在数据收集中在识别和基准选择步骤中,我说过你可能需要收集一些关于你的过程的先验数据,关于你的过程的先验信息。这里,在这种情况下你需要考虑的是过程延迟。
这在MATLAB中是什么意思呢?好的,您可以使用arima或ar的函数来构建您的模型。这很简单。这些函数估计或推断你的模型的残差。你不需要担心写,比方说,几百行代码。所以你要做的就是把这些函数应用到数据集上。
这又是一个工业数据的例子。我的意思是,你可能会说右边的过程与左边的过程相比变化幅度更小。但实际上性能指标,控制器性能指标,说明了反之亦然。右边的过程实际上比左边的过程更差这是用最小方差基准原则计算出来的。
有时,如果你在现场工作,你可能会听到一些专家或运营商的陈述,好吧,让我展示一下过程趋势。我将告诉它是否表现良好。我的意思是,这可能是有效的对于一些控制员和你的一些同事来说是广泛的经验。但是记住每个工程师的控制器数量。这是一个乏味的任务。这就是为什么我们需要在那里应用一些控制绩效评估技术。
现在你知道如何计算性能了。但是性能问题的原因是什么呢?这是下一个问题。所以你会回想起控制器面临的7个主要问题。我们很幸运,几乎所有的问题都会在时域趋势或频域趋势中留下某种信号或指纹。
除此之外,我们也很幸运,大多数问题都可以转化为两个基本的信号性质,即振荡和非线性。因此,主要是控制调谐和扰动传播在我们观察到的趋势中显示为振荡,而传感器故障和控制阀问题显示为振荡和一些非线性。
首先,我想谈谈振荡。比方说,这些是我们观察到的最常见的问题,或者说,我们在数据中观察到的最常见的指纹。你们看到的图显示了控制系统中不同的振荡模式。所以,记住你有经验的同事所说的,通过视觉检查,他或她可以发现问题。
在这种情况下,这变得更加困难,因为在这张图中,每个趋势都有自己的问题。所以它可能是调谐问题,或者传感器故障问题,或者粘滞问题,或者其他问题。所以它们都表现为指纹,数据中的振荡指纹。但是仅仅通过视觉检查来查看数据并试图找出控制回路的问题已经不是一件容易的任务了。
所以在控制回路中检测振荡最简单的方法是观察信号的周期图。周期图实际上是基于傅里叶变换,它将信号分解成频率分量。在MATLAB中,我们可以用周期图函数来实现这个目的。
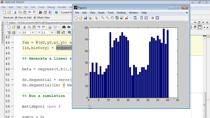
让我们看一个工业上的例子。所以你们可以看到,振荡在时域中几乎是不可能看到的。但是如果你画出这个信号的周期图,我们会看到877秒时的一个分量以3.7%的功率主导了信号。也许你会说,好吧,就振荡而言,这个振幅并不大。
我们稍后再讨论。我的意思是,我有一个工业用例,案例研究,你可以看到一个很小的振荡,这是你不能通过观察图像或数据观察到的,可能会导致大问题。
另一种分析振荡的方法实际上是自相关函数。基本上,它计算了信号与自身在不同滞后时的相关系数。在MATLAB中,你也有一个函数,这个autocorr函数可以帮你做这个分析。
对于我在前一张幻灯片中展示的相同过程,你可以在自相关图中看到振荡模式。我的意思是,也可以通过观察图形来描述振荡的特征。我就不详细讲了。所以在文献中有一些方法可以用这个自相关函数来描述和创建一些kpi这也是可能的。
在时域趋势中分析振荡的模式也是可能的。例如,你可以应用模式识别方法计算控制器中正负区域的相似度。实际上,你可以确定相似度的阈值。如果您的KPI—计算的指标超过了比率阈值,您可能会说您的系统中存在振荡。
但是如果你有一个这样的过程,你可以很容易地识别振荡。但是当然,你需要记住这种时域方法你只是比较这里的面积,你只是比较那里的相似性,很容易产生测量噪声因为如果系统中有很高的测量噪声,你就不能有那种,比如说,完美的模式,你可以很容易地看到并发现那里有振荡。如果你应用的是时域,这可能是不可能的。这有点类似于基于模式识别的方法。
另一个重要的点是检测非线性。你还记得在本节的开头。最常见的非线性之一就是二次相位耦合。这个例子来自于文献,实际上是这个方法的发明者,乔杜里和他的朋友。所以如果过程中有相位耦合,就有两个频率控制信号,但也有一个耦合的,系统中的另一个频率是f3。
为了澄清这个问题,我想给你们看一个例子。所以我们有两个生成的信号,在时间趋势和频率分析中看起来几乎相同。然而,这些信号之间的主要区别是底部的信号具有相位耦合效应。所以你可以在双谱分析中看到这些峰值,而顶部的信号没有。这意味着底部的信号具有某种相位耦合效应。我的意思是,我会解释为什么我们要研究相位耦合效应。
所以在这里,你能做的就是应用这个由乔杜里和他的朋友发明的双谱分析。这样,你就可以分离信号中的这些分量。如果存在相位耦合,你应该在频率对分析中观察到那种峰或者可能是山的形状,这种双谱分析。这也是基于信号的傅里叶变换。你可能已经意识到这一点因为它仍然隔离了频率并将时间序列数据分解为它的频率分量。
为什么我们要识别非线性?你可能在听这个网络研讨会的时候问过这个问题。所以主要要识别控制阀的问题。这里,你可以看到控制阀问题有四种不同类型的指纹。所以在这些图中它们有非常独特的形状。
实际上,图c中所见的问题是最常见的,即迟滞现象。顺便说一下,它也被称为滞回和死区。它也被称为摩擦问题,它描述了在控制阀中发生的静摩擦。这是控制阀最常见的问题。
对于这个问题,控制器发送信号给阀门打开它。但是由于静摩擦,阀门卡住了。过了一段时间,静摩擦就消失了因为你只是把一些控制输出信号推到阀门上。阀门就会立刻打开。然后你的瓣膜信号在某一点上出现峰值。
然后你的控制器意识到,我需要减小设定值和控制器之间的误差设定值和过程值之间的误差,然后试图关闭阀门,但是静摩擦实际上又在台上了。这样就形成了一种循环行为。因此,这种行为在控制输出中显示为锯齿形状,从这个工业示例中可以再次看到。
所以如果你的控制阀有摩擦问题,很有可能,你会在过程趋势中观察到那种数字。好的,这又是锯齿形,所以当你观察控制输出信号时。
观察这个信号的周期图,你会发现有两个频率控制着这个信号。然后是双谱分析。正如你所看到的,有一些相位耦合,频率耦合效应,所以山峰和山的形状很明显。
但是如果你把这个简单的控制输出和过程测量画出来,你会看到一个几乎完美的椭圆如果你有那种粘滞问题的话。看看这个形状的完美。所以它不是——我的意思是,我应该说它不是100%的椭圆,但是你可以用一个椭球来近似这种形状。摩擦问题其实很清楚如果你还记得几秒钟前在控制中遇到的问题。
然而,你不可能每次都那么幸运。看一下过程趋势,就可以对图中的阻力产生怀疑。这也是一个工业例子。当然,控制输出的简单图,控制输出与过程测量的对比给出了一些关于阻力的想法。但是看起来很乱。我的意思是,它有一个椭圆形。但要像左边的过程那样得出结论并不容易。
但是,这些变量的简单图能很好地说明粘滞问题。因此,在这里,一个想法可能是应用一个滤波器来隔离您刚刚从双谱分析中获得的确切频率,然后绘制您的过程测量与控制输出信号。在这种情况下,你可能会有更清晰的粘滞信号。
同样,如果你想描述你的粘滞问题,这也是个好主意。因此,简单地说,如果您将一个椭圆固定到您的控制器输出与可变过程测量数据,x轴将量化您在特定控制阀中有多少阻力,而y轴将量化您有多少迟滞。
但不幸的是,拟合椭圆到这样的数据集中,比方说,x-y数据,不是一个简单的任务。但文献中有一些可用的方法。如果你想在阻力分析中创建一些kpi,在文献中有一些可用的方法,你可以用椭圆来匹配你的数据,看看你的控制阀有多少滞回或有多少阻力。
由于我们的时间有限,我将无法详细介绍用于检测问题的更先进的技术。因此,在结束这节课之前,我想谈谈控制维护,我们如何控制维护,对不起。
因此,诊断当然是控制性能评估的重要组成部分。然而,更大的图景始终是业绩评估。这就是你需要做的基本分析,对你的控制系统得出一些结论。
但是控制绩效评估有一个问题。因此,在大多数情况下,性能下降并不是仅仅归因于单个控制循环的原因。所以,这是一种控制循环链的问题它们相互影响,某些问题通过控制器传播。但是你可能会说,好吧,那怎么做呢?这可能是个问题。
假设你有这样的过程,顺便说一下,这又是一个工业例子。这里有一些,比方说,热交换器,一个分离柱,还有一些过程,那里有一个反应堆。假设你刚刚计算了这些控制器的性能指标。
所以看起来温度控制器TC1和压力控制器PC1和PC5有一些问题。但你可能会问,在这个过程中会不会有一个影响其他人的主要角色?因为这里有一些循环流。在这些流之间有一些上游和下游的连接。通常,答案是肯定的。但是你可能会说,我们如何识别这种问题。
就像这样。实际上,我想在那里展示一些传播。这还是一个工业例子。首先,TC1似乎有问题,那边的温度控制器。在这个特殊的例子中,温度控制器中只有0.5度的振荡,你不能简单地通过观察数据通过基于频率分析的方法和基于时域分析的方法来识别。所以是0.5。你可以想象它和温度的标称值相比并没有那么大。
但是这个问题,这个振荡,实际上传播到下一个控制器,TC3。这实际上改变了C1柱入口的蒸汽分数。这对柱中的蒸汽流量有直接影响并导致顶部压力控制器的一些变化,PC1在那里。这引起了顶鼓的变化,C4,引起了回流流速的变化,FC1。
这会引起柱内液体流量的变化并影响底层LC3。LC3是那边这个FC3的从控制器,反之亦然,LC3是那边的主控制器。FC3为从控制器。主控制器通过从控制器传播振荡。你会发现这类问题。
因此振荡会传播,并导致系统的一些性能下降。即使这是一个很小的单元你有20个控制回路,振荡会传播。如果你有一些,比如说,下游的单元连接到这些单元的出口线,振荡可能会通过其他单元传播,比如说,导致一些后续的问题。在那里,你观察到这些控制器和连接的其他控制器的性能问题。
所以有可能用不同的方法来识别这个传播链,比如你可以利用因果关系分析或者某种常见的振荡分析,你可以利用这些周期图或者一些基于频域的分析。或者你甚至可以利用信息论来检测这些传播。这些也是可能的。
最后,实际上,如果你使用不同的算法,或者说不同的方法,它最终会有不同的指标或kpi。所以你可以计算的可能的度量是这些,但实际上,它不局限于这些。但事情远不止于此。您甚至可以创建自己的KPI或度量来计算系统的某种性能指标。
然而,到最后,您将意识到一些度量标准将帮助您纠正领域中的问题。例如,控制阀的问题,而有些会帮助你纠正问题,我的意思是,如果你坐在电脑前做一些调整,比如控制器调整。所以这取决于你在这方面付出了多少努力。这取决于那一个。
因此,在最后一部分,我想简要地谈谈一些要点和评论。但是在开始之前,我想简单讲一下在这类应用中如何利用MATLAB。首先,MATLAB有广泛的库用于不同的目的,并有编写良好的文档。所以后面有一个很大的社区,你可以在那里问问题或搜索不同的例子。我的意思是,假设有大量的可用信息,你可以在你的情况下利用。
其次,MATLAB为您带来了在正式上线之前创建原型的方便。因此,您可以以相对较低的工作量构建原型应用程序,并在不同的场景中对其进行测试。你也不需要向IT专家寻求帮助。当然,您可以通过使用MATLAB工具箱来部署应用程序,例如,热电生成,但我不会详细介绍这一点。但如果你愿意,那也是可能的。
第三个,实际上MATLAB有处理流数据的能力。因此,如果您在那里有所需的工具箱,您可以直接连接到历史记录,获取一些数据并运行应用程序,并查看应用程序在那里计算的kpi。所以它也有能力在边缘和云中运行你的应用程序。我们说,它有这种灵活性。
此外,您还可以将代码或应用程序与不同的平台或语言集成。如果你已经开发了一些应用程序,你可以从这些应用程序中插入或取出一些数据。或者您可以将已经用不同语言开发的不同代码集成到MATLAB环境中。这给你的工作带来了很大的灵活性。
在结束演讲之前,我想说一些要点——首先是数据。你应该有一个好的数据库来进一步进行评估。正如您在前面几节中看到的那样,控制性能的估计非常简单。但是举例来说,如果你想利用最小方差,它使用起来很简单。但诊断实际上需要一些额外的指标来量化那里的问题。所以你也可以根据这些指标创建一些警报,让控制工程师更容易根据这些kpi得出一些结论。
但实际上,在这种情况下,为度量选择正确的参数是至关重要的,因为如果您为正在使用的识别方法选择了适当的参数,可能会导致一些错误的决定。这可能会在维护任务的资源分配上造成一些问题。
进程间的相互作用或传播应该一直被考虑,因为,通常情况下,实际上如果你有一些——我的意思是,如果你有这么多性能差的控制循环,很可能有很大的概率,有一个控制循环会导致一些问题并通过其他控制器传播。它可以被确定为根本原因。所以你需要考虑过程之间的相互作用。
最后要说的是,如果系统中有高级过程控制层,你应该始终保持尽可能高的基础层性能,以充分利用它。否则,你可能会损失20%到25%的APC收益。
现在,我想结束我的演讲。当然,我们今天在这里讨论的议题远不止这些。但是我试图在控制性能评估应用程序中涵盖要点。我希望它能让你们对控制绩效评估的技术和哲学有一些了解,可以说是一段旅程。
感谢大家参加这次网络研讨会。我想,在剩下的部分,如果有任何张贴在问答框里的问题,我会尽量回答。是的,谢谢。