MATLAB,S万博1manbetximulink和针对的Simscape机电一体化系统设计
设计,优化和验证机电系统
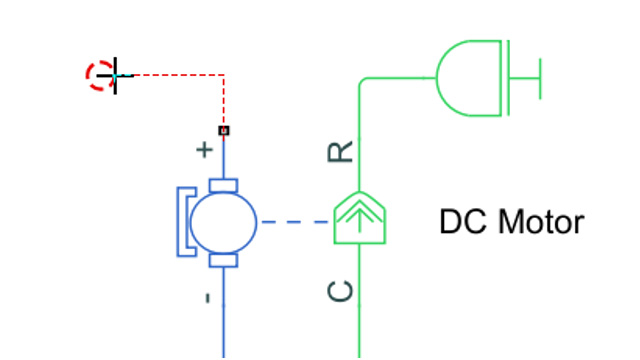
开发机电一体化系统集成需要与控制系统和嵌入式软件的物理子系统。工程师使用,基于模型的设计对多学科的机电一体化系统进行建模、仿真和验证。
随着MATLAB®,S万博1manbetximulink的®和的Simscape™,您可以:
- 了解从算法设计复杂系统的相互作用对植物行为
- 通过与多个团队并行工作,加快发展
- 预测和优化系统性能
- 提高机电一体化系统的质量和测试使用更少的硬件原型
- 从仿真模型自动生成代码消除手工编码错误
- 从需求到设计到代码保持可追溯性
- 重用设计模型作为可操作的数字双胞胎
“使用Simu万博1manbetxlink进行基于模型的设计使我们能够开发仿生处理助理和其他机电设计所需的复杂的气动控制。使用Sim万博1manbetxulink PLC编码器,它现在更容易从设计到产品得到的。”
吕迪格·诺伊曼博士,费斯托
使用MATLAB,Simul万博1manbetxink和针对的Simscape机电一体化系统设计




发现客户成功
浏览产品s manbetx 845
控制设计和管理逻辑
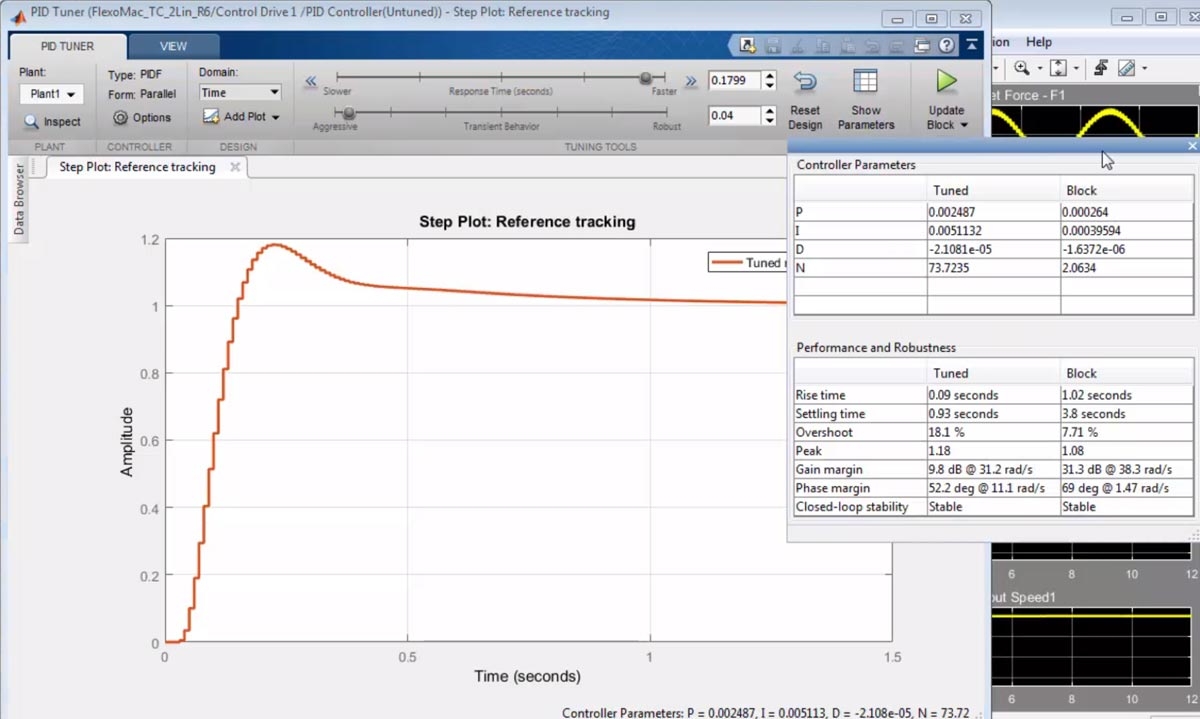
线性化非线性物理模型来开发闭环控制系统的线性控制技术,如波特图或根轨迹,或使用先进的控制策略,如模型预测控制和鲁棒控制。杠杆预置的功能和互动工具,自动调整和优化控制器,以满足系统的性能要求和稳定性的约束。分析在时域和频域,如过冲,上升时间,相位裕度和增益裕度关键性能和稳定性的特点。
开发并验证状态机进行监控和错误处理。使用图形动画来分析,虽然它正在执行以确定潜在的设计错误调试监控逻辑。
学到更多
- 起重机应用安全控制逻辑的设计(4:28)
浏览产品s manbetx 845
硬件在环测试和快速控制原型
缩小与快速控制原型(RCP)的算法来为您的生产环境做准备。使用硬件在环(HIL)工厂和环境模型的模拟,以减少物理样机。运行的Speedgoat硬件实时仿真和分析MATLAB的结果,以提高你的机电一体化系统的性能。

学到更多
- 在模拟实时:电动执行器(5:11)
浏览产品s manbetx 845
产品代码生成
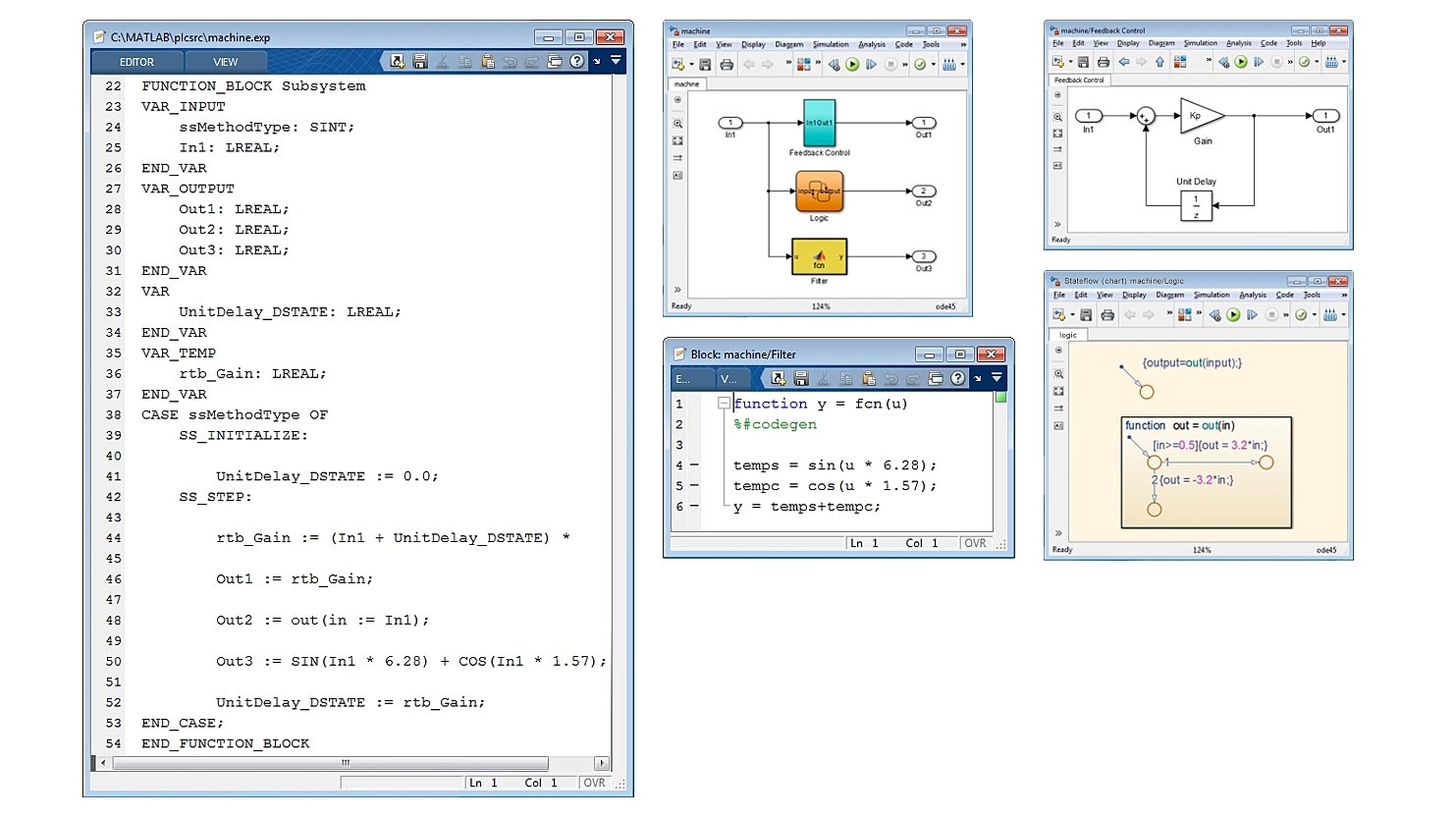
通过自动生成优化的C,C ++,IEC 61131-3(结构化文本和梯形图),CUDA消除手动编码错误®,Verilog的®或VHDL从MATLAB和Simulink直接代码。万博1manbetx杠杆浮动和固定点设计工具来调查性能折衷。整合生成的硬件无关的代码到您的PLC平台集成开发环境(IDE)为您实时硬件部署和联机调试。
学到更多
- 基于模型的设计用于预测性维护(7所画)
浏览产品s manbetx 845
验证与确认
在模型中创建、导入和管理需求,以维护跨设计、测试和生成代码的可跟踪性。证明设计满足需求,为模型覆盖自动生成测试用例,并使用正式的测试方法在整个开发过程中提高设计的质量。使用正式方法和静态分析检查模型和代码遵从性。通过静态代码分析发现bug,并证明缺少关键的运行时错误。生成必要的报告和工件以验证行业标准,例如IEC 61508、ISO 26262和DO-178。


让我们知道我们能如何帮助你。
联系我们的自定义评估,并得到定价根据您的需要。