PID调优与参考跟踪和植物的不确定性
这个例子展示了如何使用仿真软件®设计优化™跟踪参考信号和优化万博1manbetx工厂的不确定性模型的响应。植物的植物模型由传递函数,包括饱和块和速度限制。使用以下步骤查看结果。
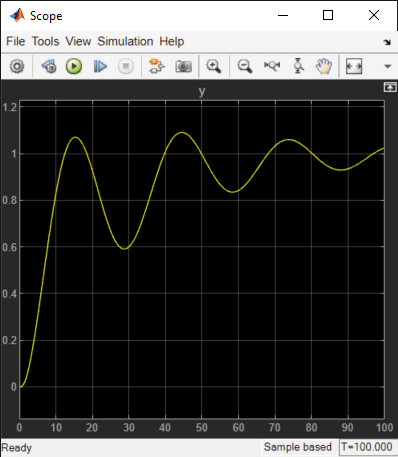
打开pidtrack_demo使用下面的命令和运行仿真模型。仿真产生非阶跃响应和初始数据的优化。
open_system (“pidtrack_demo”)
![]()
双击范围块视图实现阶跃响应。
双击阶跃响应规范块将限制植物响应,包括上升时间、沉淀时间和最大超调。
双击参考跟踪规范块查看控制器跟踪参考信号。
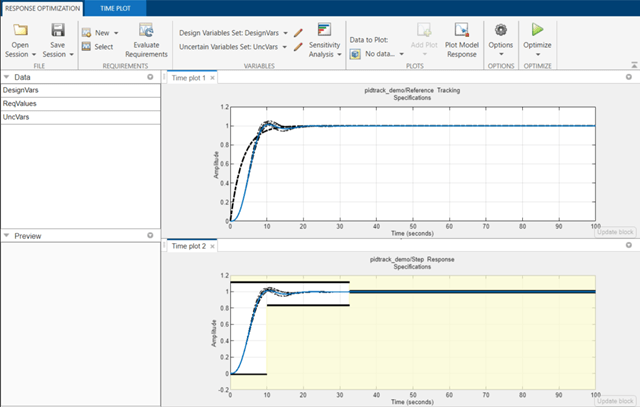
你可以启动响应优化器使用应用程序菜单在仿真软件将来发布,万博1manbetx或sdotool在MATLAB®命令。您可以启动一个预先配置的优化任务响应优化器首先打开模型并通过双击橙色块模型的底部。从响应优化器,按下图模型反应按钮来模拟模型和显示最初的设计如何满足设计要求。

图中的实线表示植物响应而不考虑不确定性和虚线表示不确定的反应。
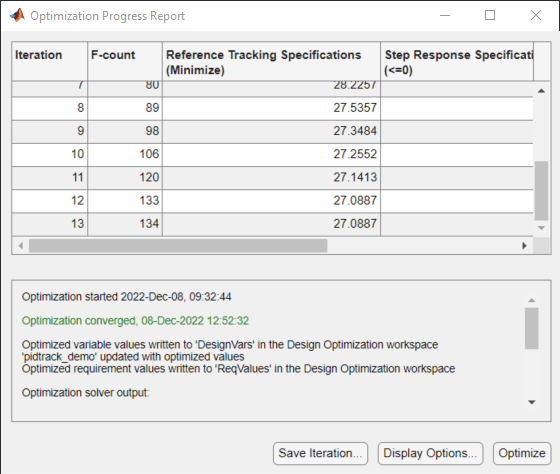
启动优化按优化按钮响应优化器。
调优参数PID控制器收益Kp,Ki,Kd。设备参数a1和a2只有在10%(不确定性)。
优化旨在减少之间的差距实际和名义值的理想反应(实线)和最小/最大(虚线)的值a1和a2。
故事情节表明更新设计要求已经满足。
%关闭模式。bdclose (“pidtrack_demo”)