无人机的工具箱
设计、模拟和部署无人机应用
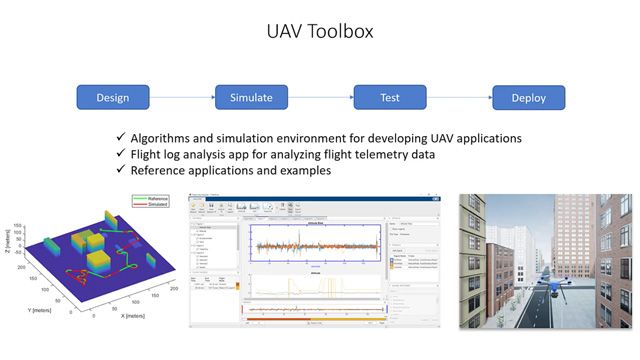
“无人机工具箱”为无人机和无人机应用的设计、仿真、测试和部署提供了工具和参考应用。你可以设计自主飞行算法、无人机任务和飞行控制器。飞行日志分析仪应用程序可以交互式分析3D飞行路径,遥测信息和传感器读数从常见的飞行日志格式。
对于自主飞行算法和飞行控制器的桌面仿真和硬件在环(HIL)测试,您可以生成和模拟无人机场景。您可以在逼真的3D环境或2.5D模拟环境中模拟相机、激光雷达、IMU和GPS传感器输出。
“无人机工具箱”提供了无人机常用的参考应用实例,如多旋翼无人机自主投递包裹等。该工具箱支持C/ c++万博1manbetx代码生成,用于快速原型、HIL测试和独立部署到硬件(如Pixhawk)®自动驾驶仪(嵌入式编码器®)
开始:

模拟无人机包裹递送传感器读数。

虚幻引擎无人机仿真
在使用虚幻引擎渲染的3D模拟环境中开发、测试和可视化无人机自主飞行算法®从史诗般的游戏®同时生成高保真相机和激光雷达传感器数据。

在虚幻引擎渲染的3D环境中模拟场景、车辆和传感器。

与飞行日志分析仪应用程序交互分析遥测数据。

由遥测测井数据生成的图。

用制导模型块将固定翼或多旋翼无人机表示为降阶制导模型。

固定翼无人机航路点跟随控制器的设计与仿真。
MAVLink连接
与无人机硬件连接以交换消息,并使用微型飞行器链接(MAVLink)通信协议检查主题列表、连接和客户端。

使用MAVLink协议与无人机硬件通信,调优无人机参数。
PX4蒙
在PX4上进行模拟时访问Pixhawk Autopilot外围设备®主机与目标无人机工具箱支持包PX4万博1manbetx自动驾驶仪.使用嵌入式编码器构建和部署飞行控制算法到Pixhawk自动驾驶仪。

设计飞行控制算法并部署到Pixhawk自动驾驶仪。
