各位好。我叫格雷厄姆·达金,是MathWorks电气技术部的首席产品经理。在本演示中,我想分享一些关于电动飞机架构建模和仿真的信息,包括桌面和实时仿真。在整个演示过程中,我将使用一个概念上的混合动力飞机的示例。这是我整合的一个系统,反映了某些对本次讨论很重要的技术属性,但并不代表特定类型的飞机。
我将首先讨论模型保真度与技术准备之间的关系。这将有助于为模型保真度的选择来帮助为我们在技术开发周期的位置进行一些背景。接下来,我将介绍Simscape本地求解器,如何使用它,以及它如何与Simulink全局求解器相关。万博1manbetx然后,我会概述我们如何为我们的多域物理系统模型的不同部分使用不同的样本时间。在考虑实时模拟时,这尤其重要。
然后我将更详细地讨论概念混合动力飞机系统。我有许多变种,我将讨论从直流等效系统到一个系统,结合热响应和主动冷却的发电系统。接下来,我将讨论如何使仿真模型实时兼容,并展示使用Simulink real和Speedgoat硬件的实时仿真结果。万博1manbetx然后,我将讨论如何使用模型参考保护和Simulink Coder来保护模型或模型段的知识产权。万博1manbetx以及如何使用Simulink编译器创建FMU独立组件。万博1manbetx最后我将总结一下。
在本节中,我将讨论模型保真度和技术准备度之间的关系。技术准备水平量表(TRL量表)最初由美国宇航局开发,用于量化特定技术在特定开发阶段的成熟度。TRL 1是你的尤里卡时刻,你有了最初的想法,并开始进行基础研究。TRL 9是您拥有成熟和表面技术的地方。
TRL尺度可以有一些解释。换句话说,一个人的TRL 5可能是另一个人的TRL 6,但量表始终遵循你在左边看到的关键发展属性。为特定的TRL编号分配技术属性通常是由从事技术工作的工程团队完成的。如果我们首先考虑桌面模拟的模型逼真度,那么我们通常会看到不同水平的模态逼真度来自不同的技术准备水平。
当你开始基础研究时,你会有低保真度的模型。例如,您可能拥有具有基本功能的模型,它可能传递一些高级的系统信息,例如功率流和组件规模,但是它是技术不可知的,这意味着模型不能捕获特定的技术特征。随着技术的成熟,捕获更具体技术属性的仿真模型将被创建。例如,您可以结合实际技术类型的模型,如具有磁场定向控制的永磁同步电机。但是在中等保真度阶段,您可能仍然没有关于物理组件和控制组件的供应商特定信息。
具有特定供应商架构的高保真仿真模型,包括物理组件和控制系统架构的特定戏剧化化。该模型还可能包括详细的电子热和冷却系统,以及通信协议。注意,所有的保真度级别都可以跟踪到TRL 9。这样做的原因是,随着技术的成熟,您可以开发具有不同细节级别的模型,不仅支持您的技术的实现,还可以用于指导技术人员,作为操作员培训模拟器,或作为数字孪生。万博1manbetx每个应用程序都需要不同级别的模型细节。
我们可以采取的另一个视图是探索桌面仿真,实时测试和生产实现,作为技术准备的函数。当我们查看此视图时,初始失败和可行性评估通常在桌面上探讨,然后才能使用[?硬件?]在循环中。并进行快速控制原型,以进一步降低风险控制算法和物理架构。
生产阶段是在实际生产硬件上部署算法的阶段,这是自动热电联产直接部署目标的阶段,可以在接近完整系统部署时提供显著的好处和验证验证。在本演示中,我将只考虑TRL 1到4,而对TRL 4略有改进,因为我考虑在没有任何硬件接口的实时平台上部署物理系统模型。我应该注意,这是我自己对TRL映射的解释,只是为了说明。
现在让我们看一个机电驱动的典型例子,并考虑建模属性如何与技术准备情况相关。这里我需要指出的是,这是一个基于我自己判断的说明性例子,不应该被视为一个严格的映射。但它将提供一些背景,家庭建模细节可以演进,随着技术准备的演进。
我们从一个理想的机电驱动开始。这是我们的最低保真度,电压、速度、电流和扭矩之间的关系是由一个比例常数定义的。在这个模型中,我们看到直流电压水平使用一个占空比输入的平均值变换器。占空比与特定的电压有关,因此与特定的速度有关,因此我们不需要反馈控制系统来进行速度控制。有了这个模型,我们可以设定更大的时间设定来实现更快的仿真,但我们只增益、高电平的信息电压和电流,而没有具体的技术特性。因此,我们可以把这个模型看作TRL 1。
接下来,我们可以包含一个更详细的模型。在这种情况下,线性永磁同步电机。我们包括一个平均值转换器,它直接将占空比转换为电压改革。所以我们还没有引入电力电子开关。我们现在可以合并一个更详细的反馈控制系统,在这种情况下,一个磁场定向控制器的速度控制,我们可以执行快速的设计迭代。由于我们已经引入了一种技术类型,并建立了一个更有代表性的控制系统,我们可以将这个模型视为tlr2。
接下来,我们可以介绍一种具有双功率电子开关的开关线性变换器。利用该模型,我们介绍了具体的PWM开关算法,并验证了反馈控制系统在存在开关的情况下将有效运行。我们还可以初步了解开关谐波对电压和切割的影响。由于我们正在执行控制算法的去风险和引入更多技术特定行为,我们可以认为该模型是TRL 3。虽然这个例子相当基本,但我希望随着技术成熟度的发展,它传达了一些模型保真度方面的考虑。
在本节中,我将解释Simscape局部求解器和Simulink全局求解器之间的关系,以及这些设置如何影响模拟性能和精度。万博1manbetx通过在Simscape求解器配置块上选择局部求解器,使用固定步长求解器对Simscape网络进行仿真,并将Simscape网络作为一个离散系统呈现在Simulink中。万博1manbetx如果取消选择局部求解器,则使用全局Simulink求解器模拟Simscape模型。万博1manbetx稍后,我将展示一个说明性示例来阐明这些要点。
有三种本地求解器类型。反向欧拉,梯形法则和分割法。分区求解器将Simscape网络的整个方程组转换成几个较小的切换线性方程组,这些方程组通过非线性函数连接。这可以为某些网络带来更快的模拟。需要注意的是,并不是所有的网络都可以使用分区求解器进行模拟。例如,高度非线性系统及其阶跃系统,在使用分区求解器之前可能需要进行一些调整。我不应该讲求解器选择,我应该展示实际操作。我举个例子。
在这个模型中,我有一个简单的直流电路和一个适合电阻负载的理想开关。开关是通过脉冲宽度调制来控制的,载波频率为5000赫兹,调制波为60赫兹。电路有两种版本。左边的电路使用Simulink全局求解器。万博1manbetx明白我的意思了吗?我将打开模型配置参数,进入求解器,我们现在设置了变量步长离散。这意味着左边的Simscape模型将使用变量状态离散解算器进行更新,尽管它的名称是连续解算器,因为它可以检测零交叉或不连续。
右侧的圆圈使用Simscape Local Solver。所以我们在求解器配置上看到,我选择了选定的本地解算器,在这种情况下,我正在使用分区求解器。让我刚刚为左侧模型带来求解器配置。请参阅,我没有选择本地求解器,因此,它正在使用模拟全局求解器。因此,使用划分求解器更新右侧的Simscape模型,并将Simscape模型作为分立系统Simulink。万博1manbetx
请注意,电压测量值在局部解算器电路上高亮显示D1,这意味着它是离散的。注意左边的测量值高亮显示为连续。最后,请注意,两个PWM发生器都使用Simulink全局解算器,因为它们是Simulink模型,您可以看到PWM信号标记为FiM,这意味着在小时间步长内固定,这是一个连续信号。万博1manbetx
那么,这意味着什么?我们将首先查看PWM信号。您可以看到全局求解器准确地捕获脉冲,但由于它被配置为检测零点。意思是,它可以检测非常小的脉冲[?比特。?]现在我们将看看电压测量。黄色使用本地求解器绕电压测量,蓝色使用全局求解器缩放电压测量。请注意,我们看到电压测量的差异,因此让我们放大它。
您可以看到,尽管使用全局求解器的电压响应准确捕获脉冲位元,但使用局部求解器的电压响应无法捕获小于定义的采样时间(在本例中为50微秒)的脉冲位元。对于给定的局部求解器设置,需要工程判断来确定模拟速度和精度之间的平衡。作为一般规则,您需要为本地求解器设置Simscape,以便部署到实时系统,如Speedgoat。
在本节中,我们将探讨如何配置一个模型,以便为不同的物理网段使用不同的示例时间。前提是,当我们构建一个包含不同物理域的物理系统模型时,我们认识到整个网络的单个样本时间可能不是最优的有效执行。例如,如果我们有一个只有一个采样时间的电热系统,我们必须设置那个采样时间来准确地捕捉最快的动态,在这种情况下,这将与电气系统有关。
热时间常数通常比电时间常数慢得多。所以我们会过度采样模型的热部分,导致较慢的模拟速度。然而,通过拆分电气和热力系统并通过Simulink信号连接它们,我们可以为每个模型片段分配单独和更合适的采样时间。万博1manbetx这里显示的例子显示了一种方法,在其中,使用热端口来分割物理系统。你可以看到,为了平衡能量流动,我们在通过边界传递热量,流动和温度。
您可以在Solver配置块中设置不同的样本时间,两个网络之间的物理信息由巨大的转换块管理。你看这里,在这个例子中,左边是D3的采样右边是D1的采样。对于这个例子来说,哪一个比另一个快并不重要,关键是我们可以使用速率转换块来管理信息交换。
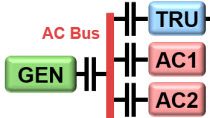
在本节中,我们将讨论概念混合动力飞机的直流等效系统模型。这里可以看到的是高级系统模型和Simscape。我们有两个主涡轮机,通过发电机以2.7千伏直流电供电。同样在2.7 kV水平,我们有两个由电动机驱动的电动涡轮机。我们也有一个电池,所以我们可以管理电力流。然后我们将电压从2.7千伏降到270伏,同时断开执行器和座舱负载。
我们还有基本的指挥和管理功能。这是一个直流等效系统模型,这意味着我们尚未对交流部件进行建模,我们将主涡轮机建模为理想转速源,将电动涡轮机建模为理想扭矩源。有了这个模型,我们可以进行非常快速的模拟,这为我们提供了关于高级别作战响应的信息。现在,我们将打开模型并仔细查看。首先,我将单击generator one。你可以看到,我们使用的是一个理想的机电转换器发电机一。事实上,我们在所有机电系统中使用这些理想的转换器。
能量管理非常简单。在这种情况下,如果电力系统需要超过1兆瓦,那么电池将补充涡轮发电机。请注意,这是相当做作的,但我设置了这些设置,以便我们可以清楚地看到模拟的功能行为。控制界面命令来自预定义的时间序列,我创建这个时间序列是为了显示2500秒内的样式行为。现在我们来运行这个模拟。
所以你可以看到它非常快速地模拟。模拟2,500秒的飞行轮廓需要大约15秒的实时。在这种情况下,仿真采样时间为10毫秒。所以让我打开模拟数据检查器。我打算选择发电机1电源,涡轮机2电源,以及电池电量。您可以看到,随着涡轮机坡道超过500千瓦,电池踢到500千瓦的发电机。请记住,我们有另一个涡轮机和另一个发电机,该发电机呈现相等的功率。因此,您将看到电池功率有效地是双倍的,因为它也提供了其他涡轮机。
从功能的角度来看,我们看到的是预期的行为。当涡轮机的功率超过500千瓦时电池就会开始工作,一旦功率降到500千瓦以下,电池就会停止工作因为发电机的容量已经低于500千瓦了,所以我们不再需要电池了。
因此,在使用模型保真度最低的直流等效系统模型时,您能够构建系统级架构,测试基本功能,查看基本能量流,并确保组件的大小适合您的系统。因为这些模拟运行得非常快,你可以利用数千或数万个模拟,以便在更广泛的操作范围内获得统计意义。
在本节中,我们将讨论一个概念混合动力飞机模型。它包含交流和直流组件,并使用平均值功率转换器。利用该模型,我们介绍了具体的发电和执行器技术,即磁场定向控制的永磁同步电机。发电机使用恒速驱动,并固定在400赫兹的电力,与磁场定向控制器的发电系统保持直流电压水平。
执行机构是变速的,并在位置控制下操作。我还包括了更详细的主涡轮机,它们被建模为英国的循环燃气涡轮机。在这种情况下,电动涡轮机是理想的扭矩源。我们将在下一节讨论在发电机中包含热响应。首先,我将打开模型,我们可以看得更详细。
让我们来看看布雷顿循环燃气轮机。他们的模型使用了气体和热域,就像你在这里看到的,我用恒速驱动把发电机连接到涡轮机的主轴上,在这里钻个洞。恒速驱动是一种基本的实现方式。我已经固定了发电机连接在左边作为一个恒定速度的200赫兹机械源,这涉及到400赫兹电力作为两对完整的发电机。然后功率被转移到右边的涡轮位置,从那里计算反作用力扭矩。
注意,两边在D1和D2表示的不同的采样时间进行操作。D1是电采样时间,在这个例子中是50微秒。D2是燃气轮机较慢的采样时间,在这个例子中,是0.5毫秒。我们用不同的采样时间来反映不同物理系统中不同的时间常数。我们还将看到,使用不同的示例时间使我们能够使用Simulink实时和SpeedGoat硬件实时运行该模型。万博1manbetx
我需要注意的另一点是,燃气轮机的解算器配置——我使用了带有三个非线性迭代的反向欧拉。我这样做的原因是,燃气轮机的方程是复杂的非线性方程,所以我需要使用反向欧拉来精确地解这些方程。对于电力系统,另一方面,让我来看看电力系统的解算器构型。所以我们用的是一个非线性迭代的分块求解器,这对于我们在电气方面的交直流系统的保真度来说是足够的。
在电气系统上,让我钻入一个亚胺之一 - 左亚胺。我们使用Field Dieasted Control驱动PMSMS。因此,只要钻入内部扭矩控制回路,对于那些是电力电子工程师的人,您将识别用于现场或控制系统的内扭矩回路或内部电流环路的标准配置。在这种情况下,我们正在生成调制波,因此空间向量调制。我们将在仿真输出上检查一下,但我们期望在这里看到某个特征,我们将在我们到达时检查。
我们往回走,找到发动机。所以我们有一个线性电流磁铁同步机,我们把调制波的占空比直接输入一个平均值逆变器。所以我们没有电力电子开关与这个特殊的实现。随着技术的成熟,我们可以在后期添加电力电子开关。
现在我们来看看其中的一些反应。打开模拟数据检查器。我要做的第一件事是选择一台发电机。在供电范围内是负的,所以功率上升到250千瓦左右。在这个场景中,我正在增加电动涡轮机的耗电量,并且我已经指示能源管理系统在发电机达到250千瓦时使用电池供电。所以我看到了预期的反应。注意我们看到的波纹,这是驱动器从正角度到负角度循环的结果。我马上就给你们看。
让我们看看涡轮机的功率。我们转到马达1,PDC,我们看到功率在上升。这种情况下,1.2兆瓦的功率电机。所以我们先不谈了,我们来看看电池。你看,这里的电池正在提高功率。在这种情况下,它将达到1.9兆瓦。所以这里的数字有点做作,但也要记住——你想知道,为什么电池的功率比电机的功率大?那是因为有两个马达。有两个电动涡轮机,因此我们看到了电池供电的结果。
好的。让我们看看执行器。看看左副翼,再看看theta。所以我们看到,我只是把它们循环成正负两种,正如你所看到的。这就是为什么我们在直流电压上看到了我们之前看到的波纹的部分原因。另一个我想看的是占空比。这是占空比。我提到过我们在寻找一个非常特殊的信号因为我们使用空间矢量调制。你可以看到这里,我们有这个双驼峰这是空间矢量调制的经典特征。我们再一次看到了我们所期望的。 We're verifying the functional correctness at this level of model fidelity.
在本节中,我们将讨论概念上的混合动力飞机模型,该模型包含热发生器和主动冷却。我们首先为我们的发电机安装的永磁同步电机暴露了热端口。定子绕组的端口为HA、HB、HC,转子的端口为HR。由于我们希望热电路的采样时间比电气系统慢,因此我们通过Simulink信号连接系统。你们可以在这里看到,为了平衡能量,我正在通过Simulink边界传递热流率和温度信息。万博1manbetx
还要注意速率转换块,它管理跨两个不同的样本时间的数据传输。此时D3为热系统采样时间,D1为电系统采样时间。转子和定子绕组的热模型显示在顶部,并使用传导和对流元素。我应该指出,我已经参数化了热系统,以在仅几秒钟的模拟中显示热响应。从这个意义上说,这是相当做作的。然而,我的主要目的是展示可以用于创建多领域物理系统的建模构造。
底部所示的主动冷却系统使用热流体,如果超过温度阈值,则泵将激活以使流体循环通过管道并冷却系统。在这里,我们看到了相位绕组绕组的热响应,并产生2.仅发生器1具有主动冷却,因此我们可以看到响应的差异并确认主动冷却电路正常运行。在这种情况下,主动冷却电路被配置为调节温度至60摄氏度。正如我之前所说的那样,我参数化了该系统只能在几秒钟的模拟时间内显示热响应。该模型的更严格的发展将包括更合适的参数值,以观察到预期的热时间常数作为电能和热质量的函数。
在本节中,我们将讨论使用Simulink实时和SpeedGoat硬件的概念混合动力飞机的实时仿真。万博1manbetx所以我要做的是一步一步地完成你所经历的建立模型并将它部署到SpeedGoat的过程。模型的第一步是选择实时选项卡来构建和部署模型。接下来在MATLAB提示下,我们可以创建一个Simulink实时对象。万博1manbetx所以tg等于slrt,现在我们有了物体tg。我们可以通过各种方式与SpeedGoat互动。要运行模拟,只需键入tg。start。
我们还可以使用任务分析器来查看任务执行时间。所以你可以看到这里的命令。我不会继续阅读这些命令,但是您可以在此处看到你将如何做到这一点,然后你会绘制执行配置文件任务剖析器允许不同费率的C任务执行时间。这里的基率是电动采样时间,即50微秒。子速率1是与制动和循环燃气轮机相关联的采样时间,并且子速率2是与发电机热系统相关联的采样时间。
这里有两点需要注意。首先,将与不同采样时间相关联的模型截面分布到不同的岩心。这被称为隐式并发执行。稍后,我将向您展示用户如何显式地控制所使用的内核。第二,热力系统大约需要两个电池来执行,布雷顿循环燃气涡轮机大约需要三个电池来执行。这告诉我们,如果我们不将样本时间分割到不同的模型部分,我们将无法实时模拟燃油系统。为了让用户对跨多个核的任务划分有更多的控制,我们可以使用模型参考。在本例中,我使用了三个模型引用来构建完整的系统。让我打开这个模型,向你们展示独立的模型引用是如何连接的。
这是模型。因此,三个独立的模型通过模型引用在顶层进行连接。只要双击机械装置,我们就有了两个布雷昂循环燃气轮机。双击这里就可以了。这里有布雷顿循环,有电源输入。1 / z是需要用代数符号表示的。热系统,我们有一个线圈的热模型,然后我们通过Simulink信号把热流传递出去,再把温度带回来。万博1manbetx只要双击热模型,我们在前面的部分看到过。最后,电力系统。你可以看到我们正在把数据输入和输出发电机。 So temperature heat flow for the thermal system, and power for the Brayton cycle gas turbines.
因此,通过这些信号,我们然后使用转到才能获得适当的信号连接,让我们完成完整的系统。接下来,我们进入配置参数,我们选择配置任务,然后选择“启用显式模型分区以进行并发行为。一旦我们这样做,我们就可以明确定义定期任务。所以我们在这种情况下定义三个。用于电气系统,机械系统和热系统的TaskElec,Taskmech和Tasktherm。
请注意,您的最快速率需要在每个块中设置。让我回到这个模型,更详细地展示一下,比如为什么会这样。所以只要钻回机械系统。所以你看到电力以电的速度从这里进来,然后我双击这里。我们没有一个速率转换,然后将它转换到机械样本时间,所以在模型引用的边界上,你需要以最快的样本时间传输数据,然后在模型引用的内部用速率转换处理它。这就是为什么需要在每个块中定义最快的采样时间。
然后,我们从实时标签构建和部署模型,并执行之前完成的。我们创建SLRT对象,然后通过该对象与SpeedGeat进行交互。我们现在采取此系统并查看任务执行时间。我们与上一个系统有奇偶校验,所以我实际上已经完成了它来偏转隐式并发执行所做的事情。所以你现在可以看到我们有三个任务。TaskElec,Taskmech,Tasktherm,以及我们具有相同的计算行为,因为如我所说,我不会与最后一个系统均匀。因此,重新强调我们在这里看到的那些样本。任务执行时间告诉我们,如果我们在不同型号部分中没有分开样本时间,我们将无法实时模拟整个系统,并且我们无法使用较慢的样本速率,用于热系统和呼吸循环燃气轮机。
通过显式分块,我们可以进一步控制实时系统中计算资源的使用。随着模型复杂性的发展,我们可以考虑将模型划分到不同的位置,并在每个核中包含多个样本时间。当然,这些选择是特定于系统的。
在本节中,我们将讨论如何保护模型引用以隐藏模型实现细节,并保护知识产权。要保护给定的模型引用,首先右键单击模型引用。在这种情况下,在左下角的热系统,在上下文菜单中选择子系统和模型参考,然后为所选模型块创建保护模型。在创建受保护的模型窗口中,选择simulate,如果你想部署这个受保护的模型,比如使用Simulink real time和SpeedGoat,那么你也会选择User generated code。万博1manbetx
对于如何处理这些代码,有一些子选项。在本例中,我选择了模糊的源代码,这意味着生成的代码将降低可读性。如我所说,通过选择使用生成的代码,然后选择SLRT。tlc文件用于代码生成,我将能够在SpeedGoat上部署这个受保护的模型。当你点击创建一个slxp文件将被创建。这是一个受保护的Simulink模型。万博1manbetx
然后,您可以在模型引用中引用受保护的模型。让我实际带来模特来告诉你,而无需穿过幻灯片,所以让我走出这一点。好的。这是实际模型。所以你知道要引用某个模型,你右键单击,转到块参数模型引用,您可以在此处查看,我指的是受保护的Simulink文件。万博1manbetx现在,如果我双击此项,则不会打开模型。它会做什么,打开一个保护模型报告。所以现在只需双击此“。
所以在这里我们有报告。因此,当您双击时,这就是您将看到的内容,它为您提供了一些属性,如您为受保护模型构建的支持功能所做的选择。万博1manbetx因此,您现在可以在阅读任何型号时运行系统模型,但请注意,您无法访问可能在未受保护模型中定义的任何内部测量值。因此,当我使用模型引用时,我通常在模型引用中具有信号,即我标记为此,所以我可以在模拟数据检查器中查看它们,以便保护模型不可用,因此请确保您的任何信号需要查看通过输出端口。最后,您将注意到模型参考左下方的屏蔽图标,。这是该特定模型引用受到保护的指标。
在本节中,我们将讨论使用Simulink编译器创建FMU独立组件。因此,我们首先要做的是创建一个模型,其中包含要为其生成FMU组件的系统。所以在这种万博1manbetx情况下,我们选择热力系统。下一步是选择Save,然后在下拉列表中选择standalone FMU。从那里,我们得到了FMU用户界面,因此您只需选择要将FMU组件导出到的目录,然后单击“创建”。一旦构建FMU组件,它将被置于单独的模式。因此,我应该注意到,与受保护的模型参考类似,您不能访问FMU组件内的内部信号。因此,如果您需要任何测量值,那么您应该通过输出端口将其输出。
所以在这个例子中,我将在整个端口中显示两个内部热模型的温度T1和T2,这样我就可以查看响应。然后,我们可以将FMU部件放置在燃油系统中。因此,当您使用FMU组件时,它仅用于桌面模拟。FMU组件不部署。让我给你们看一下模型,然后给你们看一些模拟结果。好的,这是我的模型。我这里指的是FMU组件。我给出了T1和T2,所以我们在这里看到的是发电机1和发电机2对定子线圈的热响应。发电机2是这些继续倾斜的轨迹,这里没有主动冷却。1号发电机,主动冷却被启用,以调节约60摄氏度。所以我们看到了预期的行为。
通过本演示,我们了解了对电动飞机架构建模和仿真非常重要的一些方面。我们首先研究了模型保真度和技术准备度之间的关系,并举例说明了随着技术准备度的成熟,我们如何建立模型保真度。然后,我们更仔细地研究了Simscape局部解算器及其与Simulink全局解算器的关系,以了解在使用固定深度解算器实现一定精度方面,会产生什么影响和价值。当我们可以设置物理系统时,这些物理系统是相互连接的,但属于不同的领域,例如相互连接的电气、机械、气体、热力系统,我们研究了如何将不同物理网络段的不同采样时间合并到完整的系统模型中。万博1manbetx
因此,这有助于我们,它有助于我们更有效地模拟具有不同时间常量的不同物理域的更复杂的系统。然后我们花了更多的时间看着情绪混合动力汽车。因此,一个示例飞机架构,它有许多我们希望看到电动机架构的技术属性,但这与特定的飞机类型没有对齐。我们开始查看DC等效系统模型,系统模型我们可以很快运行,获得系统级功能操作的高级感,我们可以从中运行潜在的数万种操作场景,以获得统计显着性整体运营响应。
然后我们看了关于这项技术的更多细节。因此,将永磁同步电机与磁场定向控制结合起来,但使用平均值转换器,因此我们不需要将混合电子开关结合起来,尽管当您查看更详细的建模时,这显然是可以做到的。我们正在看到越来越多的兴趣,并将热建模引入到电气模拟中。我展示了一个例子,说明了如何为永磁同步电机创建一个热模型,以及如何结合一个主动冷却系统。然后,我花了一些时间讨论了我们如何为实时仿真设置仿真,特别是使用Simulink real time和SpeedGoat,然后我结束了讨论模型参考保护,我们可以保护模型段的知识产权,以及我们如何使用Simulink编译器创建FMU独立组件。要下载与本演示相关的MATLAB脚本和Simulink模型,请访问MathWorks文件交换并搜索更多电动飞机和Simscape。非常感谢。万博1manbetx