在这个视频中,我们将在嵌入式微控制器上实现面向字段的控制算法。我们将旋转这个无刷PMSM电机,我们将使用德州仪器LaunchPad处理器和DRV8305逆变器模块控制。我们将使用与运行模拟相同的模型。在右手边,我们看到模型中不同的抽样率。当前循环以50微秒的速度运行,而速度循环则慢10倍。然后我们还有串行接收子系统,它以10hz的频率从主机模型获取数据。现在,我们将转到硬件选项卡,点击设置。我们看到,我们已经配置了模型来为Texas Instruments F28379D处理器生成代码,并且我们正在使用Embedded Coder来生成代码。
如果我们看看当前的控制子系统,我们可以看到这个模型包含了来自Motor control Blockset的算法块,如Park和Clarke块,以及来自C2000支持包的驱动块。万博1manbetx当我们从这个模型生成代码时,Embedded Coder同时生成算法和驱动程序代码。然后自动编译所有代码,并将目标应用程序下载到处理器。让我们通过按“构建、部署和启动”按钮来实现这一点。这将启动代码生成过程。我们可以在诊断查看器上看到进展。我们看到代码正在生成,并且在code Composer Studio IDE中自动创建了一个项目。通过点击这里,我们可以打开项目并从IDE进行调试。我们现在可以看到应用程序已经下载到目标,我们已经准备好旋转我们的马达了。
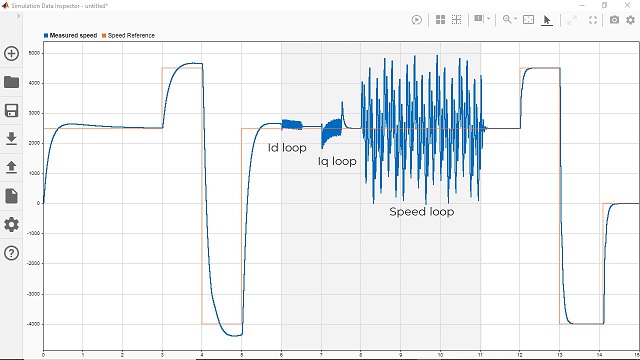
现在我们已经对微控制器进行了编程,让我们打开在我的笔记本电脑上运行的主机模型。此模型允许我们使用此旋钮设置电机轴的所需速度,其中我们以rpm为单位指定速度参考。通过这个开/关开关,我们还可以指定电机何时开始旋转。该模型通过串行端口从目标应用程序接收速度和电流等信号,并在此范围内绘制每个单位的标准化值。要在主机上开始执行,我们转到simulation选项卡并按run。我们在右边的范围内看到测量结果。让我们打开开关,开始转动马达。我们看到电机速度如何开始跟踪参考。让我们尝试将参考速度设置为一组不同的值,并观察电机响应。我们上升到电机基线速度的0.8。现在,让我们尝试一个从基准速度的0.8到更低速度值的阶跃变化。这是另一个更高速度的步骤。在检查了速度跟踪的性能之后,让我们看看电流。从这个菜单中,我们选择Id current。为了更好地查看当前波形,让我们打开示波器设置并将时间跨度更改为0.1秒。我们看到Id电流保持在零。接下来,让我们看看智商。最后,我们可以看看a阶段和B阶段电流。
在这个视频中,我们展示了如何使用电机控制模块和嵌入式编码器生成代码,运行在20 kHz的目标微控制器和控制无刷PMSM电机。演示到此结束。