效率最大化利用算法驱动策略与车辆模型和GPS跟踪数据。马克西米利安一个mm,亚历山大•安东尼和马克西米利安Muhlbauer设计速度控制器的EducEco /壳牌生态马拉松。安东尼和克里斯托夫•哈恩Muhlbauer加入MathWorks,展示他们的车辆模型和讨论他们的纵向速度控制器的集成。
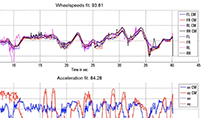
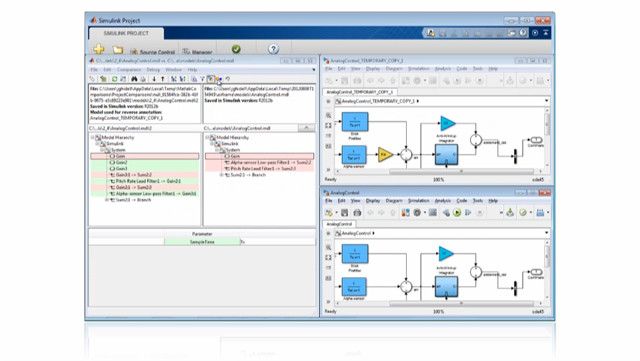
首先,亚历山大锤了如何设置一个汽车模型关注造型损失,司机,电路生成最优跟踪特定的驾驶策略利用遗传算法。你会得到一个完整的组件用于仿真的模型概述包括电路模型、车辆模型,驱动和控制模型。
接下来,马克西米利安Muhlbauer谈到使用模拟的结果。马克西米利安解释了硬件实现是在开发过程中一个至关重要的部分,以及巡航控制系统的优点和缺点。
TUfast Eco团队专业效率竞争的目标是旅行而使用尽可能少的能量。巡航控制系统可以是一个巨大的优势驾驶性能。谢谢你TUfast Eco团队展示的方法。