控制系统工具箱™ provides algorithms and apps for systematically analyzing, designing, and tuning linear control systems. You can specify your system as a transfer function, state-space, zero-pole-gain, or frequency-response model. Apps and functions, such as step response plot and Bode plot, let you analyze and visualize system behavior in the time and frequency domains.
You can tune compensator parameters using interactive techniques such as Bode loop shaping and the root locus method. The toolbox automatically tunes both SISO and MIMO compensators, including PID controllers. Compensators can include multiple tunable blocks spanning several feedback loops. You can tune gain-scheduled controllers and specify multiple tuning objectives, such as reference tracking, disturbance rejection, and stability margins. You can validate your design by verifying rise time, overshoot, settling time, gain and phase margins, and other requirements.
开始:


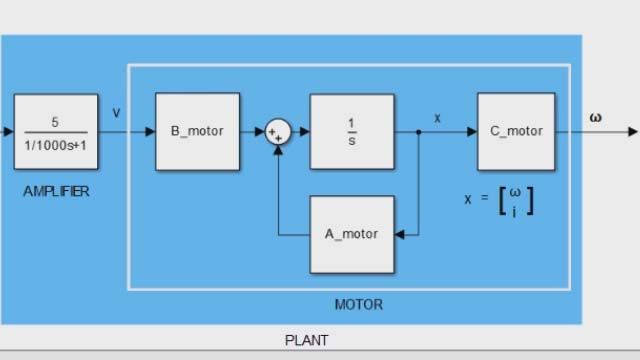
Transfer Functions and State-Space Models
Create linear time-invariant system models using transfer function or state-space representations. Manipulate PID controllers and frequency response data. Model systems that are SISO or MIMO, and continuous or discrete. Build complex block diagrams by connecting basic models in series, parallel, or feedback.
Model Discretization
Use command-line functions or interactive Live Editor Tasks to resample dynamic system models and convert models between continuous-time and discrete-time domains. Use zero-order hold, bilinear (Tustin), zero-pole matching, and other rate conversion methods.

Explore gallery (2 images)
减少模型
Use the Model Reducer app, Live Editor Task, or command-line functions to interactively reduce plant or controller model order while preserving dynamics that are important to your application. Use balanced truncation, pole-zero simplification, or mode selection techniques.

时间和频域分析
使用线性系统分析仪应用程序使用步骤响应,脉冲响应,Bode,Nichols,Nichols,Nyquist,Nyquist,单数值和零极线来查看和比较多个模型的时间和频率响应。检查特征,例如上升时间,定居时间和最大超冲。

稳定性分析
计算增益边距,相位边缘和交叉频率。从图形和数值上检查动态系统的极点和零位置。计算线性模型的电线杆的阻尼比,固有频率和时间常数。

计算增益边距,相位边缘和交叉频率。
Passivity and Sector Bounds
Compute various measures of passivity for linear time-invariant systems. Analyze systems for passivity and arbitrary conic-sector bounds.

Explore gallery (2 images)
PID Tuning
Use the PID Tuner app, Live Editor Task, or command-line functions to automatically tune PID controller gains to balance performance and robustness. Specify tuning parameters, such as desired response time and phase margin. Tune continuous or discrete PID controllers.

植物动力学的交互式估计
Create a plant model from measured input-output data directly in the PID Tuner app using System Identification Toolbox™. Alternatively, use Live Editor to identify plant dynamics and tune a PID controller.

2-DOF PID Control
Tune two-degree-of-freedom (2-DOF) PID controllers. Use a 2-DOF PID controller instead of a 1-DOF PID controller to achieve better disturbance rejection without significant increase of overshoot in setpoint tracking.

Tuning a 2-DOF PID controller (solid line) and comparing it with a 1-DOF PID controller (dashed line) in the PID Tuner app.
互动设计与根源基因座和bode图
使用控制系统设计器应用程序进行交互设计和分析SISO控制系统。使用根源基因座,bode图和尼科尔斯图表,以图形方式调整了公共控制组件,例如PID,铅/滞后网络和Notch滤波器。
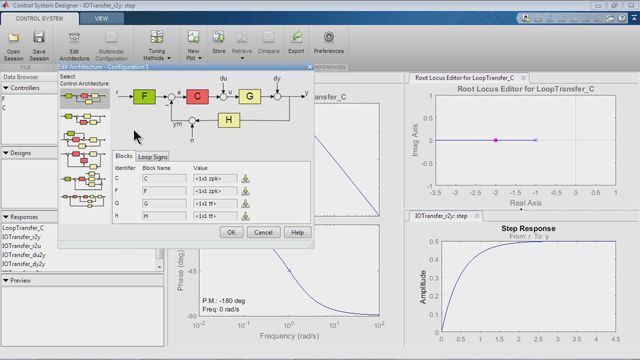
Closed-Loop Response Monitoring
通过步骤响应,NYQUIST和其他在调整控制器时动态更新的闭环和开环响应可视化闭环和开环响应。指定和评估时间域和频域的设计要求,例如上升时间,最大超冲,增益边距和相位边距。
Multiloop Design
Tune controllers that consist of multiple SISO loops. Close SISO loops sequentially, visualize loop interactions, and iteratively tune each loop to optimize overall performance.

Explore gallery (3 images)
SISO and MIMO Loops
使用控制系统调谐器应用程序或命令行functions to model and tune SISO or MIMO control system architectures with simple tunable elements such as gains, PID controllers, or low-order filters. Jointly tune several loops in a multiloop control system.

Time and Frequency-Domain Objectives
Specify and visualize tuning requirements such as tracking performance, disturbance rejection, noise amplification, closed-loop pole locations, and stability margins. Automatically tune controller parameters to satisfy the must-have requirements (design constraints) and to best meet the remaining requirements (objectives).
调整一组植物模型
Design a controller that is robust to changes in plant dynamics due to parameter variations, variations in operating conditions, and sensor or actuator failures.

设计一个适合植物参数变化的控制器。
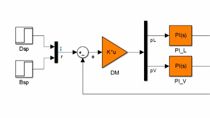
Gain-Scheduled Controllers in Simulink
Model gain-scheduled control systems in Simulink®使用诸如变化的PID控制器,变化的传输函数,变化的Notch滤波器和变化的低通滤波器之类的块。

Library for modeling gain-scheduled controllers in Simulink.
Gain Surface Tuning
自动调整增益表面系数,以满足整个系统操作信封的性能要求,并在操作点之间实现平稳的过渡。指定随着操作条件而变化的要求。在设计的完整操作范围内验证调整结果。
LQR/LQG and Pole Placement
Design continuous and discrete linear-quadratic regulators (LQR) and linear-quadratic-Gaussian (LQG) controllers. Compute feedback gain matrices to place closed-loop poles at desired locations.

卡尔曼过滤器
设计和模拟线性稳态和时变的卡尔曼过滤器。使用MATLAB CODER™和SIMULINK CODER™为这些过滤器生成C/C ++代码。万博1manbetx

Nonlinear State Estimators
使用扩展的卡尔曼过滤器,无气体的卡尔曼过滤器或MATLAB中的粒子过滤器的非线性系统的估计状态®和Sim万博1manbetxulink。使用MATLAB编码器和Simulink编码器为这些过滤器生成C/C ++代码。万博1manbetx

Linear Analysis
使用Simulink Control Design™中的线性分析万博1manbetx工具来线性化simulink模型。使用步骤响应,脉冲响应,Bode,Nichols,Nyquist,Nyquist,单数值和零极图来计算线性化模型的时间和频率响应。

Compensator Design
图形地调整SISO反馈回路,使用Simulink控制设计在Simulink中建模。万博1manbetx设计控制器使用交互式Bode,Root locus和Nichols图形编辑器添加,修改和删除控制器电线杆,零和增益。

Compensator Tuning
自动调整以Simulink建模的PID控制器的收益。万博1manbetx在Simulink控制设计中使用控制系统调谐器应用程序或命令行工具自动调整在Simulink中任意数量的反馈循环中分万博1manbetx布的控制元素的增益和动力学。

产品资源:
What's Next?

You can also select a web site from the following list:
Americas
- AméricaLatina(Español)
- 加拿大(English)
- United States(English)