 克里夫的角落:克里夫硅藻土在数学和计算
克里夫的角落:克里夫硅藻土在数学和计算 MATLAB的博客
MATLAB的博客 史蒂夫与MATLAB图像处理
史蒂夫与MATLAB图像处理 人在仿真软件万博1manbetx
人在仿真软件万博1manbetx 人工智能
人工智能 开发区域
开发区域 斯图尔特的MATLAB视频
斯图尔特的MATLAB视频 在标题后面
在标题后面 文件交换的选择
文件交换的选择 汉斯在物联网
汉斯在物联网 学生休息室
学生休息室 MATLAB社区
MATLAB社区 MATLABユーザーコミュニティー
MATLABユーザーコミュニティー 创业、加速器,和企业家
创业、加速器,和企业家 自治系统
自治系统 定量金融学
定量金融学矩阵在计算机图形学的核心
矩阵类似于如下所示的屏幕截图是计算机图形学的核心。他们描述物体在三维空间中移动。MATLAB处理图形的使用它们。MathWork新走鹃编辑器。所以做所有流行的视频游戏和CAD软件包。
内容
犹他州的茶壶
从1976年由马丁纽厄尔推出,然后在犹他大学的研究生,茶壶发挥了进口作用在计算机图形学的发展。如果你知道去寻找它,你可以看到它在皮克斯的电影和剧集的福克斯电视台的《辛普森一家》。有一个很好的维基百科页面和一个有趣的展览计算机历史博物馆。茶壶的坐标中可用MATLAB函数teapotGeometry。MATLAB住脚本描述茶壶的材质和灯光可以在这里。
茶壶= grafix;
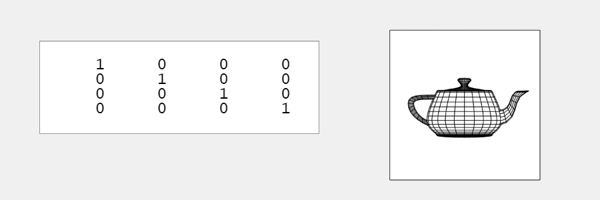
米
我感兴趣的米的矩阵面板。现在的4×4单位矩阵。这个矩阵描述的所有转换了目标对象的集合。
旋转
齐次坐标可以描述旋转,翻译和许多其他与4×4矩阵转换。矩阵操作与对象的坐标向量在第一个三个组件,现在,一个在第四。
这个矩阵离开z坐标固定在旋转x和y。
R_z (t) = [cosd (t)信德(t) 0 0信德(t) cosd (t) 0 0 0 0 1 0 0 0 0 1)
这是一个45度旋转z。
Rz = R_z (45)
Rz = 0.7071 -0.7071 1.0000 0 0 0.7071 - 0.7071 0 0 0 0 0 0 0 0 1.0000
应用这个旋转的茶壶。
应用(茶壶,Rz)

Rz * Rx
一个序列的转换由所有的矩阵的乘积来表示。
这种正交旋转的叶子x固定在旋转y和z。
R_x (t) = [1 0 0 0 0 cosd (t)信德(t) 0 0信德(t) cosd (t) 0 0 0 0 1)
遵循原来的45度z变换的旋转60度x。
Rx = R_x (60) M = Rx * Rz;应用(茶壶,米)
Rx = 1.0000 0 0 0 0 0.5000 - -0.8660 0 0 0 0 0 0 1.0000 0.8660 - 0.5000

的顺序是很重要的,因为这些矩阵不上班。这是逆转顺序的结果。
M = Rz *处方;应用(茶壶,米)

变化中
这使得y固定在旋转x和z。
R_y (t) = [cosd (t) 0信德(t) 0 0 1 0 0信德(t) 0 cosd (t) 0 0 0 0 1)
Ry = R_y(-120)应用(茶壶,Ry)
Ry = -0.5000 1.0000 -0.8660 0 0 0 0 0 0 0 0 0 0 -0.5000 1.0000 0.8660

平移和缩放
非正交矩阵来自平移和缩放。齐次坐标和M的第四列产生的翻译。一个典型的翻译是
T_x (t) = (1 0 0 t 0 1 0 0 0 0 0 0 0 0 1);
Tx = T_x (2.5)
Tx 1.0000 2.5000 = 1.0000 0 0 0 0 0 0 0 0 0 0 0 1.0000 1.0000
翻译的茶壶x轴。
应用(茶壶,Tx)

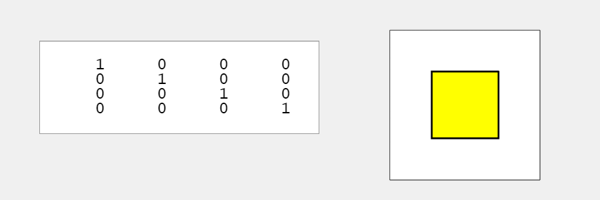
我们可以单独规模每个坐标方向。或者,这个矩阵的一个因素适用于所有的坐标。
S_xyz (t) = [t 0 0 0 0 t 0 0 0 0 0 0 0 0 1);
Sxyz = S_xyz (0.75)
Sxyz 0.7500 = 0.7500 0 0 0 0 0 0 0 0 0 0 0 0 1.0000 0.7500
“亲爱的,我缩小茶壶”。
应用(茶壶,Sxyz)

在一起
我有五个转换生成的,处方,Rz,变化中,Tx和Sxyz。这是他们的产品,他们的顺序介绍。
M = Sxyz * Tx *一* Rz *处方;应用(茶壶,米)

这是相反的顺序。
M = Rx * Rz * * Tx * Sxyz一块;应用(茶壶,米)

最后,紧急订单。
M = Rz *一* Sxyz * Tx *处方;应用(茶壶,米)








评论
留下你的评论,请点击在这里MathWorks账户登录或创建一个新的。