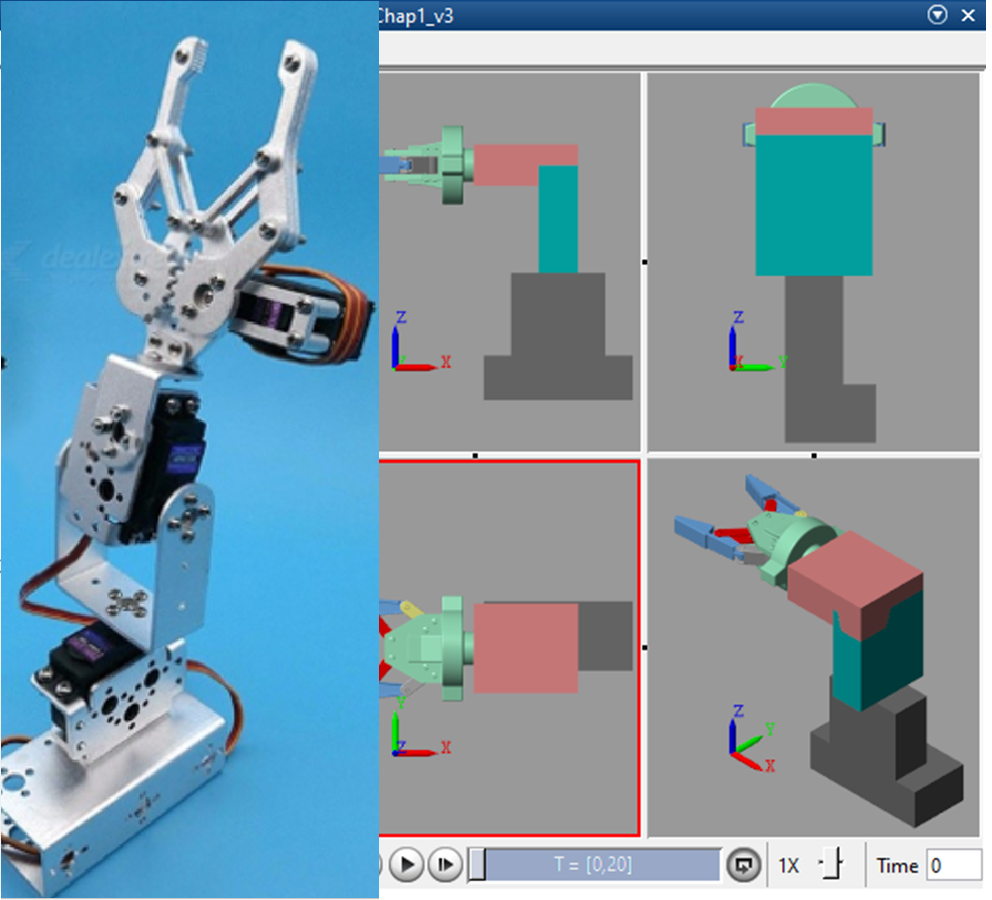
在此提交中,我们建模小三度自由机器人臂www.roboholicmaniacs.comMATLAB模拟触控器使用此臂3DOF臂主输入器向这些驱动器曲角输出端点或抓取器的x、y和z位置
代码是书中第三章的一部分
数字双机开发部署 Elsevier,2020年,Nassim Khaled,Bibin Pattel和Affan Siddiqui
iteAs
Nasim Khaled(2023年)。机器人臂使用模拟(//www.tianjin-qmedu.com/matlabcentral/fileexchange/74335-modeling-and-simulation-of-robotic-arm-using-simscape), MATLAB Central File Exchange.检索.
Chapter_3_3DOF_arm_codes
Chapter_3_3DOF_arm_codes/Application_Problem_arm
Chapter_3_3DOF_arm_codes
Chapter_3_3DOF_arm_codes/Application_Problem_arm
| 版本化 | 发布 | 发布注解 | |
|---|---|---|---|
| 1.00 |