1的结果
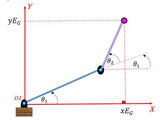
利用雅可比矩阵计算并可视化2连杆机械臂的逆运动学,并使机器人写出Hello。
您也可以从以下列表中选择一个网站:
利用雅可比矩阵计算并可视化2连杆机械臂的逆运动学,并使机器人写出Hello。
您也可以从以下列表中选择一个网站: