温度控制在一个热交换器
这个例子展示了如何设计反馈和前馈补偿器调节化学反应器的温度通过热交换器。
换热器的过程
一个名为“搅拌罐的化学反应器”如下图所示。顶部入口提供液体混合的坦克。坦克液体必须维持在一个恒定的温度通过提供不同数量的蒸汽热交换器(管)通过控制阀。输入流的温度变化是在这个过程中干扰的主要来源。
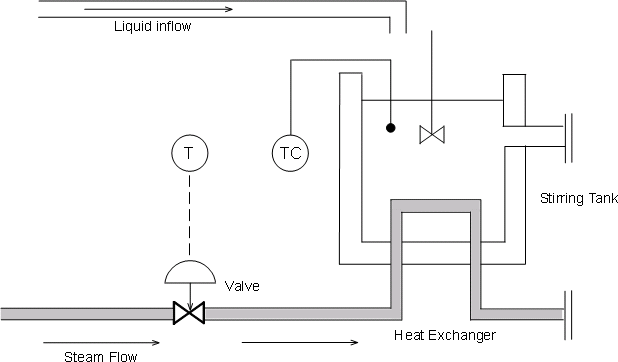
图1:搅拌反应器和换热器。
利用测量数据的换热器动态模型
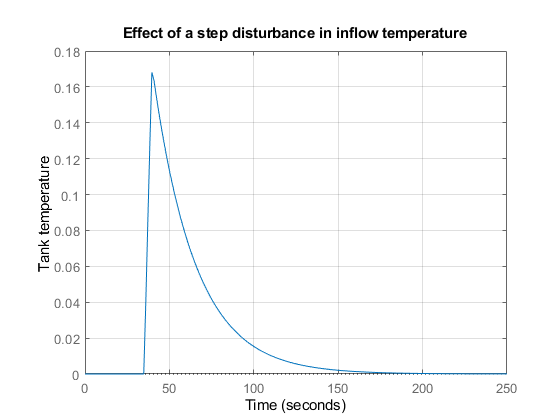
获得的first-order-plus-deadtime模型换热器的特点,注入阀电压扰动步V并记录对水箱温度的影响T随着时间的推移。归一化单位测量反应如下所示:
heatex_plotdata标题(的测量反应在蒸汽阀电压阶跃变化);

t1和t2的值是时间的响应达到其最终价值的28.3%和63.2%。您可以使用这些值来估计时间常数τ和死亡时间θ热交换器:
t1 = 21.8;t2 = 36.0;τ= 3/2 * (t2 - t1)θ= t2 -τ
τ= 21.3000θ= 14.7000
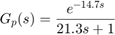
验证这些计算通过对比first-order-plus-deadtime响应与实测响应:
s =特遣部队(“年代”);Gp = exp(θ* s) /(1 +τ*年代)
Gp = 1 exp (-14.7 *) * - - - - - - - - - - - 21.3 s + 1连续时间传递函数。
持有在、步骤(Gp)举行从标题(实验和模拟响应阶跃变化的);

模型反应和实验数据很好的协议。类似的碰撞测试实验可以进行估计的一阶响应扰动步流入温度。配备热交换器和流入干扰模型,我们准备设计控制算法。
反馈控制
开环的框图表示流程如下所示。
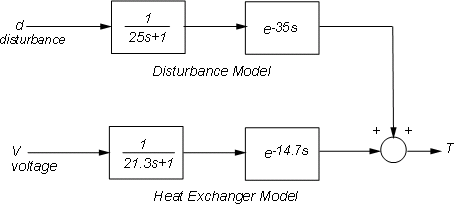
图2:开环的过程。
传递函数
如何改变电压模型V驱动蒸汽阀门开度影响水箱的温度T,而传递函数
模型是如何改变d在流入温度影响T。调节水箱温度T在一个给定的定位点茶匙,我们可以用下面的反馈体系结构控制阀门开度(电压V):

图3:反馈控制。
在这个配置中,比例积分(PI)控制器

计算的电压V基于差距Tsp-T之间所需的和测量的温度。您可以使用ITAE公式选择适当的控制器参数的值:

Kc = 0.859 *(θ/τ)^ (-0.977)tauc =(τ)/ 0.674)*(θ/τ)^ 0.680摄氏度= Kc * (1 + 1 / (tauc * s));
Kc tauc = 24.5582 = 1.2341
看看ITAE控制器执行,关闭反馈回路和模拟响应设定值变化:
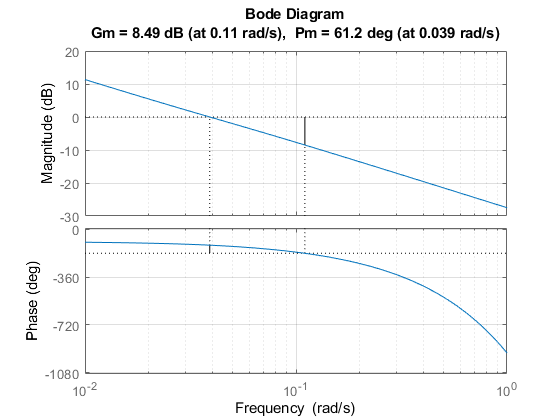
Tfb =反馈(ss (Gp * C), 1);步骤(Tfb)、网格在标题(温度的阶跃变化的响应选点T_ {sp}的识别)ylabel (水箱温度的)
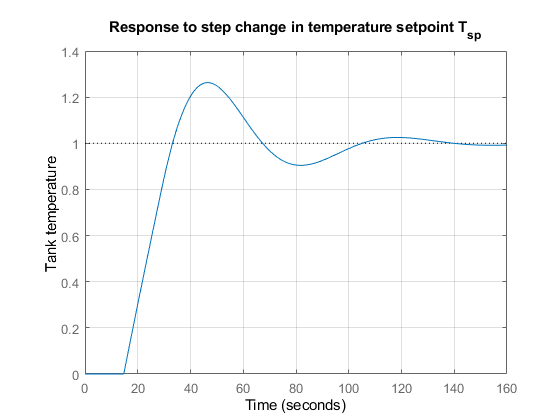
与一些过度的反应相当快。看着稳定利润确认增益裕度弱:
保证金(Gp * C),网格
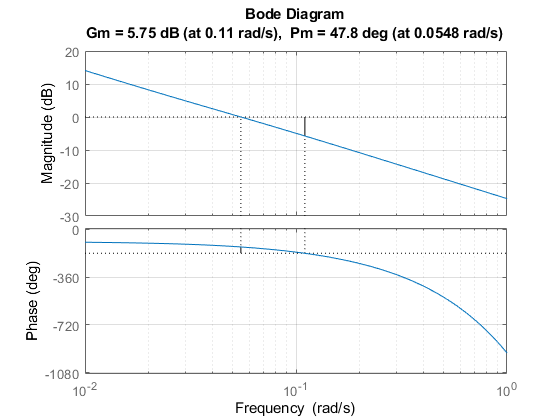
减少了比例增益Kc加强稳定的性能:
C1 = 0.9 * (1 + 1 / (tauc * s));%减少Kc从1.23到0.9保证金(Gp * C1),网格
步骤(Tfb,“b”反馈(ss (Gp * C1), 1),“r”)传说(“Kc = 1.23”,“Kc = 0.9”)

前馈控制
回想一下,流入温度的变化在水箱温度波动的主要来源。拒绝这样的干扰,另一种是前馈反馈控制架构如下所示:

图4:前馈控制。
在这个配置中,前馈控制器F使用测量流入温度调节蒸汽阀门开度(电压V)。前馈控制从而预测和预防流入温度变化的影响。
简单的计算表明,温度扰动的整体转移d水箱温度T是

完美的抗干扰性要求

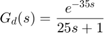
在现实中,建模不准确预防的抗干扰性,但前馈控制将有助于减少由于流入干扰温度波动。为了更好地了解前馈计划将如何执行,增加理想的前馈延时5秒和模拟对流入温度的阶跃变化的响应:
Gd = exp (-35 * s) / (25 * s + 1);F = - (21.3 * s + 1) / (25 * s + 1) * exp (-25 * s);Tff = Gp * ss (F) + Gd;% d - > T与前馈控制转移步骤(Tff)、网格标题(一步流入温度扰动的影响)ylabel (水箱温度的)
结合Feedforward-Feedback控制
反馈控制有利于选点跟踪一般,而前馈控制可以帮助测量扰动的抑制。接下来我们看看结合两种方案的好处。相应的控制架构如下所示:
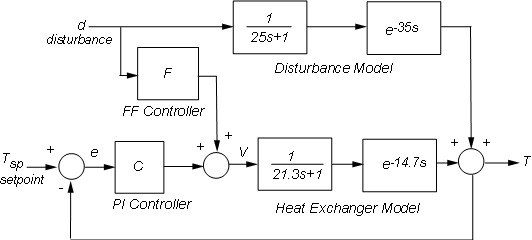
图5:Feedforward-Feedback控制。
使用连接建立相应的闭环模型Tsp, d来T。名字每个块的输入和输出通道,然后让连接自动连接图:
Gd。u =' d ';Gd。y =“Td”;全科医生。u =“V”;全科医生。y =“Tp”;F。u =' d ';F。y =Vf的;C。u =“e”;C。y =“风投”;Sum1 = sumblk (“e = Tsp - T”);Sum2 = sumblk (“V = Vf + Vc”);Sum3 = sumblk (“T = Tp + Td”);Tffb =连接(Gp, Gd, C、F、Sum1 Sum2, Sum3, {“Tsp”,' d '},“T”);
比较没有前馈控制的闭环响应,计算相应的闭环传递函数提供远景配置:
C。u =“e”;C。y =“V”;Tfb =连接(Gp, Gd, C, Sum1 Sum3, {“Tsp”,' d '},“T”);
现在比较两个设计:
步骤(Tfb,“b”Tffb,“r——”)、网格标题(的闭环响应选点和扰动阶跃变化)ylabel (水箱温度的)传说(“只反馈”,“前馈+反馈”)
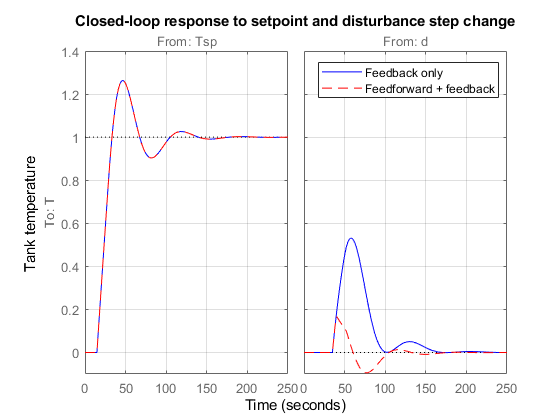
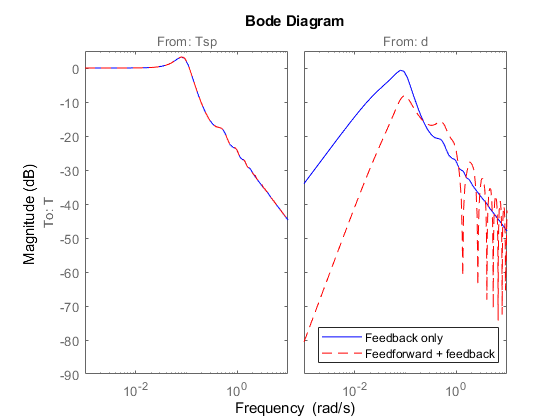
选点跟踪两个设计有相同的性能,但增加前馈控制显然是有利于抑制干扰。这也可见闭环波德图
bodemag (Tfb“b”Tffb,“r——”,{1 e - 3, 1 e1})传说(“只反馈”,“前馈+反馈”,“位置”,“东南”)
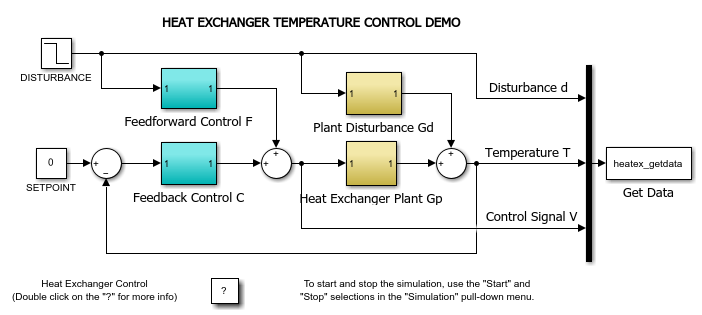
交互仿真
获得额外的洞察力和交互地调整前馈和反馈收益,使用同伴GUI和仿真软件®模型。万博1manbetx点击下面的链接来启动GUI。
heatex