多工作点PID控制器设计系列
本示例展示了如何为Simulink®中的非线性设备设计一系列PID控制器,该设备可在各种工作点上运行。万博1manbetx
开放植物模型
该装置为连续搅拌釜式反应器(CSTR)可在广泛的工作点范围内运行。单个PID控制器可有效地利用冷却液温度在PID控制器设计的小工作范围内调节输出浓度。然而,由于电厂是一个强非线性系统,如果工作点发生变化,控制性能会下降值得注意的是,闭环系统甚至可能变得不稳定。
打开CSTR工厂模型。
mdl =“scdcstrctrlplant”; 开放式系统(mdl)
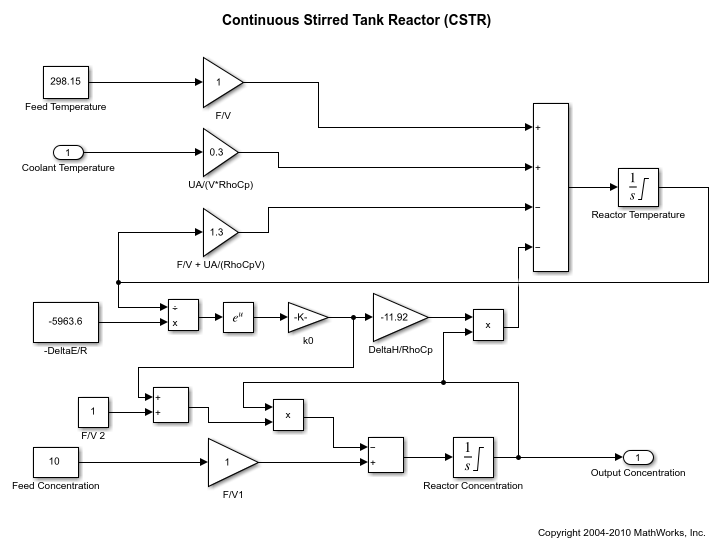
有关此系统的更多信息,请参阅[1]。
增益调度简介
解决非线性控制问题的一种常用方法是利用线性控制器的增益调度。一般来说,设计一个增益调度控制系统需要四个步骤。
获取每个操作区域的工厂模型。通常的做法是在几个平衡工作点对设备进行线性化。
为前一步得到的对象模型设计线性控制器,如PID控制器。
实现一种调度机制,使控制器系数,如PID增益,根据调度变量的值而改变。控制器之间需要平滑(无颠簸)传输,以减少对设备运行的干扰。
通过仿真评估控制性能。
有关增益调度的更多信息,请参阅[2]。
本实例重点研究了非线性CSTR系统的PID控制器的设计。
获取多个工作点的线性设备模型
输出浓度C用于识别不同的操作区域。CSTR装置可在低转换率之间的任何转换率下运行(C=9)及高转换率(C=2).在本例中,将工作范围划分为八个区域,表示为C=2通过9.
指定操作区域。
C = [2 3 4 5 6 7 8 9];
创建一个默认操作点规范数组。
op = operspec (mdl元素个数(C));
通过指定输出浓度为已知值并指定输出浓度值来初始化工作点规范。
为ct = 1:numel(C) op(ct).输出。知道= true;op (ct) .Outputs。y = C (ct);结束
计算与下列值对应的平衡工作点:C.
op, opoint = findop (mdl findopOptions (“DisplayReport”,“关”));
在这些工作点对设备进行线性化。
植物=线性化(mdl opoint);
由于CSTR装置是非线性的,线性模型表现出不同的特性。例如,高转化率和低转化率的植物模型是稳定的,而其他的不是。
isstable(植物、,“elem”)”
Ans = 1 × 8逻辑阵列1 1 0 0 0 1 1
对象模型的PID控制器设计
为了批量设计多个PID控制器,采用皮顿函数。下面的命令以并行形式生成一个PID控制器数组。所要求的开环交叉频率为1Rad /sec和相位裕度是默认值60度。
控制器= pidtune(植物,“pidf”,1);
显示控制器C=4.
控制器(:,:,4)
ans = 1 s Kp + Ki *——+ Kd * -------- s Tf*s+1具有Kp = -12.4, Ki = -1.74, Kd = -16, Tf = 0.00875并联形式的连续时间PIDF控制器。
为了分析步进设定值跟踪的闭环响应,首先构造闭环系统。
clsys =反馈(植物*控制器,1);
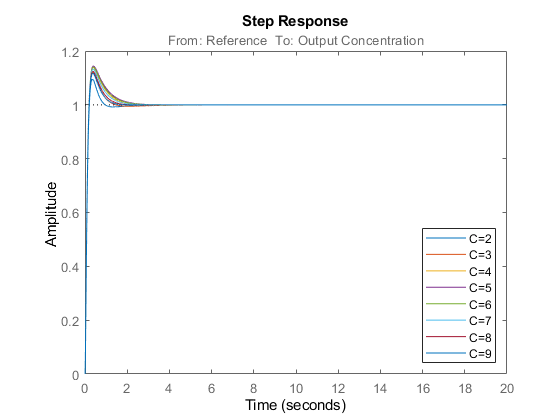
绘制闭环响应。
数字保持在…上为ct = 1:长度(C)%从LTI数组中选择一个系统sys = clsys (:,:, ct);sys。Name = (“C=”num2str (C (ct)));sys。InputName =“参考”;绘制阶跃响应曲线stepplot (sys, 20);结束传奇(“显示”,“位置”,‘东南’)

所有的闭环都是稳定的,但是不稳定对象的闭环的超调量(C=4,通过7)太大了。为了改进不稳定对象模型的结果,将目标开环带宽增加到10拉德/秒。
控制器= pidtune(植物,“pidf”,10);
显示控制器C=4.
控制器(:,:,4)
ans = 1 s Kp + Ki *——+ Kd * -------- s Tf*s+1,具有Kp = -283, Ki = -151, Kd = -128, Tf = 0.0183并联形式的连续时间PIDF控制器。
构造闭环系统,并绘制新控制器的闭环阶跃响应。
clsys=反馈(电厂*控制器,1);数字保持在…上为ct = 1:长度(C)%从LTI数组中选择一个系统。sys=clsys(:,:,ct);set(sys,“名字”,[“C=”num2str (C (ct))),“InputName”,“参考”);%绘制阶跃响应。步进图(sys,20)结束传奇(“显示”,“位置”,‘东南’)
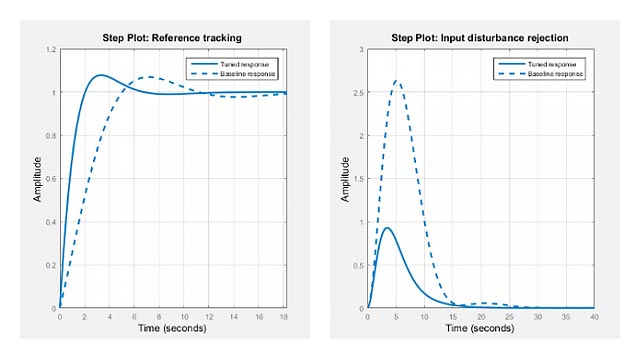
现在,所有闭环响应都令人满意。为了进行比较,请在所有操作点使用同一控制器时检查响应。创建另一组闭环系统,其中每个闭环系统使用C=2控制器,并绘制他们的反应。
clsys_flat =反馈(植物*控制器(:,:1),1);图stepplot (clsys clsys_flat 20)传说(“C-dependent控制器”,“单一控制器”)

为每个浓度单独设计的PID控制器阵列比单个控制器的性能要好得多。
然而,上面所示的闭环响应是基于全非线性系统的线性逼近来计算的。为了验证设计,在模型中使用PID Controller块实现调度机制,如图所示实现增益调度PID控制器(万博1manbetx仿真软件控制设计).
关闭模式。
bdclose(mdl)
工具书类
[1] 塞博格、戴尔E、托马斯F埃德加和邓肯A梅利尚。过程动力学与控制第二版,约翰·威利父子公司,2004年,第34-36页。
[2] Rugh,Wilson J.和Jeff S.Shamma.“增益调度研究”。自动化36岁的没有。10(十月2000):1401-1425。
另请参阅
operspec(万博1manbetx仿真软件控制设计)|芬多普(万博1manbetx仿真软件控制设计)|皮顿
相关话题
- 实现增益调度PID控制器(万博1manbetx仿真软件控制设计)
您还可以从以下列表中选择网站: