路径更光滑的样条
使用立方样条插值平稳的车辆路径
- Library:
Automated Driving Toolbox
描述
The路径更光滑的样条block generates a smooth vehicle path, consisting of a sequence of discretized poses, by fitting the input reference path poses to a cubic spline. Given the input reference path directions, the block also returns the directions that correspond to each pose.
Use this block to convert a C1-continuous path to a C2- 连续路径。C1- 连续路径包括路径计划者返回的Dubins或Reeds-Shepp路径。有关这些路径类型的更多详细信息,请参见C1-Continuous and C2-Continuous Paths。
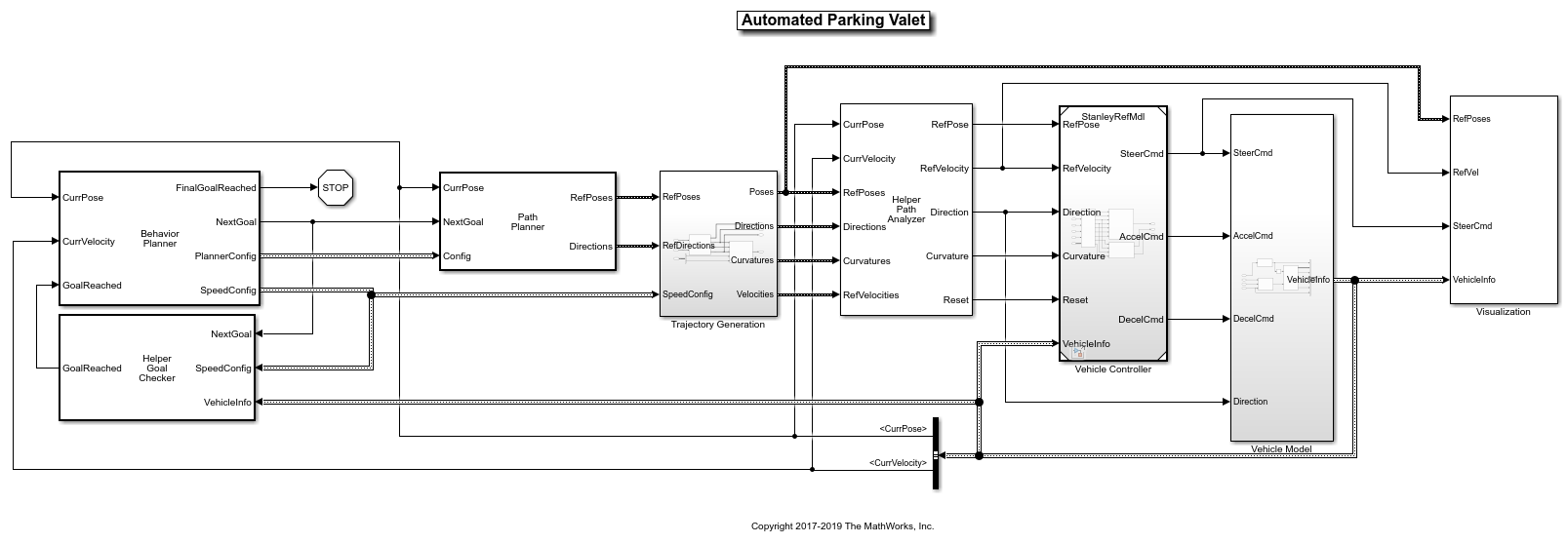
您可以使用the returned poses and directions with a vehicle controller, such as the横向控制器斯坦利block.
端口
输入
Output
Parameters
Model Examples
More About
C1-Continuous and C2- 连续路径
路径是c1-continuous if its derivative exists and is continuous. Paths that are only C1-continuous have discontinuities in their curvature. For example, a path composed of Dubins or Reeds-Shepp path segments has discontinuities in curvature at the points where the segments join. These discontinuities result in changes in direction that are not smooth enough for driving with passengers.

一个路径也是C2-continuous if its second derivative exists and is continuous. C2- 连续路径具有连续的曲率,并且足够光滑,可以与乘客驾驶。

算法
The path-smoothing algorithm interpolates a parametric cubic spline that passes through all input reference pose points. The parameter of the spline is the cumulative chord length at these points.[1]
The tangent direction of the smoothed output path approximately matches the orientation angle of the vehicle at the starting and goal poses.
参考
[1]Floater, Michael S. "On the Deviation of a Parametric Cubic Spline Interpolant from Its Data Polygon."计算机辅助几何设计。卷。25,第3期,2008年,第148-156页。
[2] Lepetic, Marko, Gregor Klancar, Igor Skrjanc, Drago Matko, and Bostjan Potocnik. "Time Optimal Path Planning Considering Acceleration Limits."机器人技术和自主系统。卷。45, Numbers 3–4, 2003, pp. 199–210.