健壮的柔性梁的振动控制
这个例子展示了如何大力优化控制器减少柔性梁的振动。这个例子是改编自“g·古德温控制系统设计”,美国格雷柏,m·萨尔加多。
不确定模型的柔性梁
图1描述了柔性梁的振动主动控制系统。
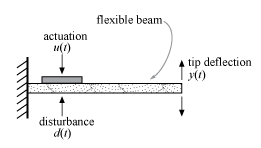
图1:主动控制的柔性梁
在此设置中,一个传感器测量位置 执行机构是一块压电交付一个力 。我们可以从控制模型传递函数的输入 提示位置 使用有限元分析。只保留第一个六个模式,我们获得的植物模型形式
用下面的名义振幅值 和自然频率 :
阻尼因素
知道很糟糕,而且认为介于0.0002和0.02之间。同样,固有频率只有大约知道,我们假设20%位置的不确定性。柔性梁的构造一个不确定的模型,使用尿素的指定对象的不确定性范围阻尼和固有频率。为了简化,我们假设所有模式都有相同的阻尼因子
。
%阻尼因子ζ=尿素的(“ζ”,0.002,“范围”[0.0002,0.02]);%固有频率w1 =尿素的(“w1”,18.95,“百分比”,20);w2 =尿素的(“那”,118.76,“百分比”,20);w3 =尿素的(w3的,332.54,“百分比”,20);w4 =尿素的(“w4”,651.66,“百分比”,20);w5 =尿素的(“w5”,1077.2,“百分比”,20);将=尿素的(“将”,1609.2,“百分比”,20);
下一个把这些不确定系数的表达式 。
α=(9.72 0.0122 0.0012 -0.0583 -0.0013 0.1199的军医);G =特遣部队(α(1),(1 2 *ζ* w1 w1 ^ 2]) +特遣部队(α(2),(1 2 *ζ* w2 w2 ^ 2]) +…特遣部队(α(3),[1 2 *ζ* w3 w3 ^ 2]) +特遣部队(α(4),(1 2 *ζ* w4 w4 ^ 2]) +…特遣部队(α(5),[1 2 *ζ* w5 w5 ^ 2]) +特遣部队(α(6),[1 2 *ζ*将将^ 2]);G。InputName =uG的;G。OutputName =“y”;
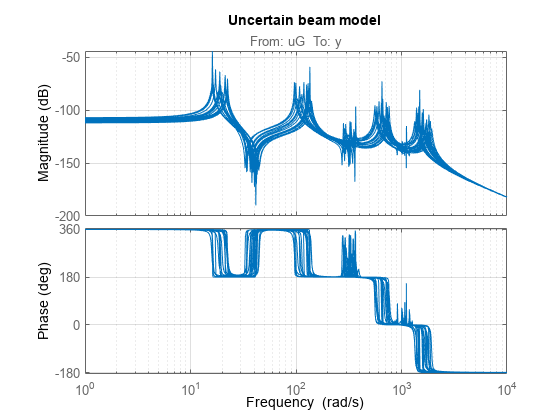
想象的不确定性对传递函数的影响
来
。的波德函数自动显示了20个随机选择的响应值的不确定参数。
rng(0),波德(G, {1 e0, 1 e4}),网格标题(“不确定梁模型”)
健壮的LQG控制
LQG控制是一种天然的配方主动振动控制。与systune,你并不局限于一个完整的订单最优LQG控制器和任何顺序可以调整控制器。在这里,例如,让我们调整一个6阶状态空间控制器(工厂订单的一半)。
C =可调参数(“C”、6、1,1);
LQG控制设置如图2所示。的信号 和 分别是过程和测量噪声。

图2:LQG控制结构
建立一个闭环的模型框图如图2所示。
C。InputName =“yn”;C。OutputName =“u”;S1 = sumblk (“yn = y + n”);S2 = sumblk (' uG = u + d ');CL0 =连接(G、C、S1, S2, {' d ',“n”},{“y”,“u”});
请注意,CL0取决于两个可调控制器C不确定的阻尼和固有频率。
CL0
广义连续时间与状态空间模型2输出,2输入,18个州,和以下模块:C:状态空间模型可调1 x1, 6个州,1出现。w1:不确定真实,名义= 18.9,差异=(-20,20)%,3出现w2:不确定真实,名义= 119,可变性=(-20,20)%,3出现w3:不确定真实,名义= 333,可变性=(-20,20)%,3出现w4:不确定真实,名义= 652,可变性=(-20,20)%,3出现w5:不确定真实,名义= 1.08 e + 03,可变性=(-20,20)%,3事件将:不确定真实,名义= 1.61 e + 03,可变性=(-20,20)%,3出现ζ:不确定真实,名义= 0.002,=[0.0002,0.02],6事件类型“党卫军(CL0)”看到当前值和“CL0。块”与街区。
使用一个LQG则作为控制目标。这个调优目标允许您指定噪声协方差和性能上的权重变量。
R = TuningGoal.LQG ({' d ',“n”},{“y”,“u”},诊断接头([1,1平台以及]),诊断接头(1 e-12 [1]));
现在优化控制器C最小化LQG成本在整个范围的不确定性。
[~,CL, fSoft信息]= systune (CL0, R);
e-05软:[5.41,0.000106],硬:负无穷,无穷,迭代软:= 156 (6.7 e-05,正):负无穷,正无穷,迭代= 72软:[6.96 e-05, 7.39 e-05],硬:负无穷,无穷,迭代= 52软:[7.21 e-05, 7.21 e-05],硬:负无穷,无穷,迭代= 30决赛:软= 7.21 e-05硬=无穷,迭代= 310
验证
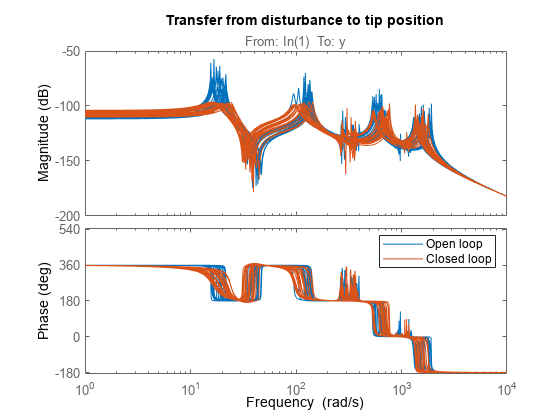
比较开放和闭环预示的回应 来 20随机选择的不确定参数的值。注意控制器剪辑前三个山峰预示反应。
临时任务= getIOTransfer (CL,' d ',“y”);波德(G,临时任务,{1 e0, 1 e4})标题(“从干扰尖端位置”)传说(“开环”,“闭环”)
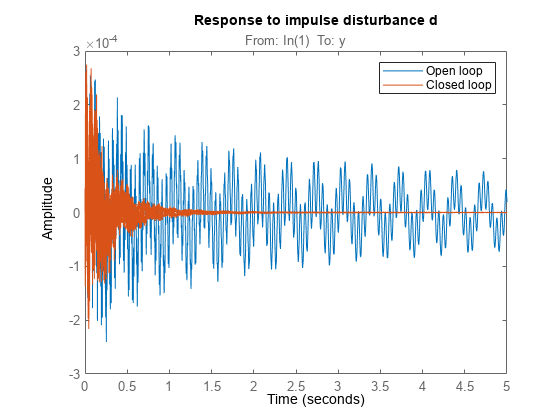
接下来的情节开放和闭环反应一个脉冲干扰 。可读性,开环反应是策划仅为名义的植物。
冲动(getNominal (G),临时任务,5)标题(脉冲扰动的响应d ')传说(“开环”,“闭环”)
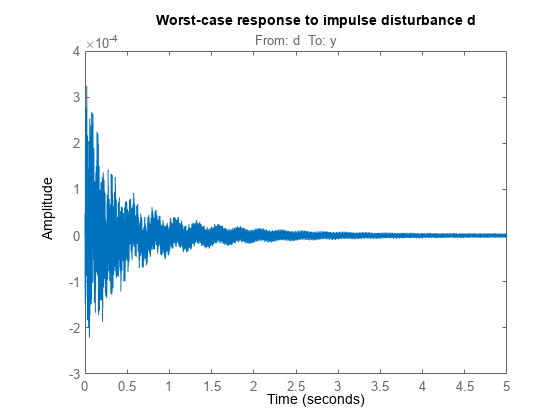
最后,systune还提供了洞察最坏的组合阻尼和固有频率值。这些信息可以在输出参数信息。
WCU = Info.wcPert
WCU =3×1结构体数组字段:w1 w2 w3 w4 w5将ζ
使用这些数据来绘制脉冲响应的两个最糟糕的情况。
冲动(usubs(临时任务,WCU), 5)标题(“最坏响应脉冲扰动d ')