pcregistercpd
使用CPD算法注册两个点云
句法
Description
tform= pcregistercpd(移动,,,,固定的)
笔记
考虑使用下采样点云PCDownSamplebefore using pcregistercpd to improve the efficiency of registration.
Examples
使用CPD算法对齐两个点云
Load point cloud data into the workspace. Extract the moving and the fixed point clouds from the point cloud data in workspace.
handData = load('hand3d.mat');移动= handdata.moving;固定= handdata.fixed;
为了提高CPD登记算法的效率和准确性,将移动和固定点云进行下样本。
朝向采样= pcdownsample(移动,“ graverage”,0.03);固定的Downsampled = pcdownsample(fixed,“ graverage”,0.03);
Display the downsampled point clouds before registration.
figure pcshowpair(movingDownsampled,fixedDownsampled,'MarkerSize',,,,50) xlabel('X')ylabel('Y')zlabel('Z')title(“注册前点云”) 传奇({'Moving point cloud',,,,固定的点云的},'textcolor',,,,'W') 传奇('Location',,,,“南部”)

Perform non-rigid registration using the CPD algorithm.
tform = pcregistercpd(movingDownsampled,fixedDownsampled); movingReg = pctransform(movingDownsampled,tform);
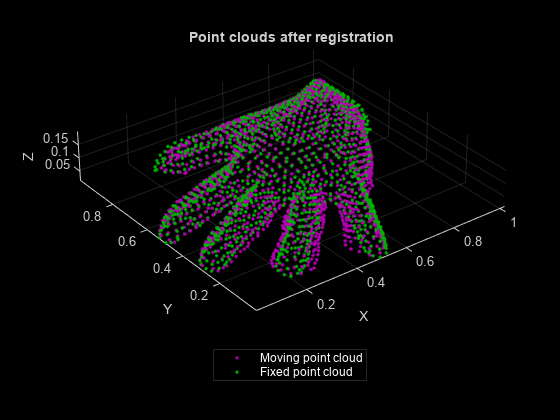
注册后显示下采样的点云。
figure pcshowpair(movingReg,fixedDownsampled,'MarkerSize',,,,50) xlabel('X')ylabel('Y')zlabel('Z')title(“注册后的点云”) 传奇({'Moving point cloud',,,,固定的点云的},'textcolor',,,,'W') 传奇('Location',,,,“南部”)
输入参数
输出参数
Algorithms

References
[[1] Myronenko, A., and X. Song. "Point Set Registration: Coherent Point Drift. "IEEE交易的图案分析和机器智能会议论文集(TPAMI)。第32卷,编号12,2010年12月,第2262–2275页。
扩展功能
版本历史记录
You can also select a web site from the following list:
Americas
- América Latina((Español)
- Canada((English)
- United States((English)