立体视觉
立体整流、差距和密集的三维重建
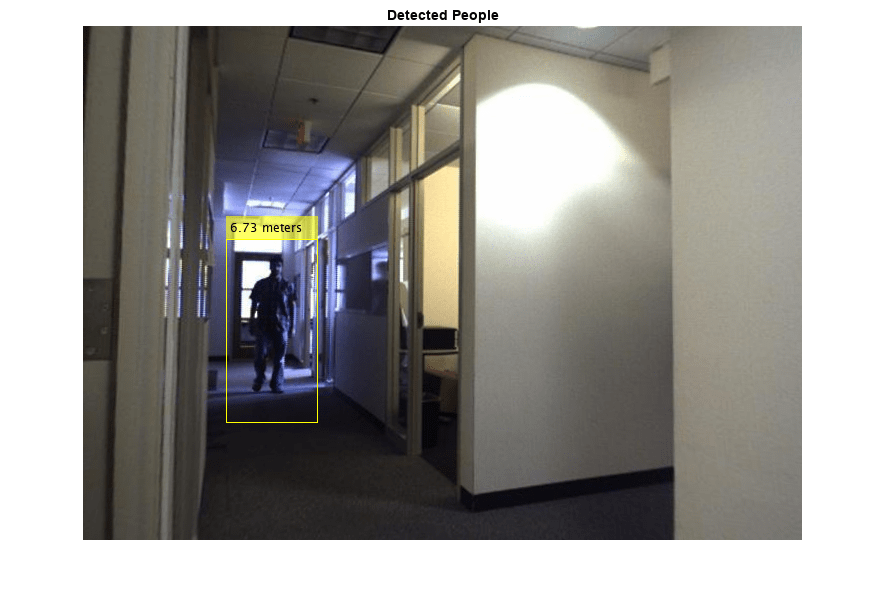
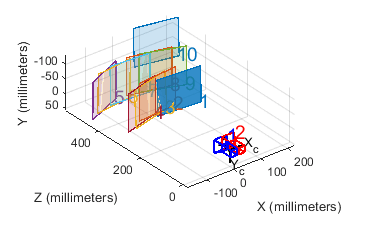
立体视觉深度恢复的过程从相机图像通过比较两个或两个以上的同一场景视图。这个计算的输出是一个三维点云,其中每个3 d点对应一个像素的图像。
立体形象整改项目图片到一个通用的图像平面的方式对应的坐标点有相同的行。立体视觉的这个过程是非常有用的,因为二维立体通信问题降低到一个一维问题。作为一个例子,立体图像矫正通常是用作计算差异或一个预处理步骤创建浮雕图像。
功能
主题
- 坐标系统
指定像素指数、空间坐标和三维坐标系统
- 使用立体相机校准器应用
校准立体相机,然后您可以使用恢复深度图像。