自动驾驶的工具箱
设计、模拟和测试ADAS和自动驾驶系统
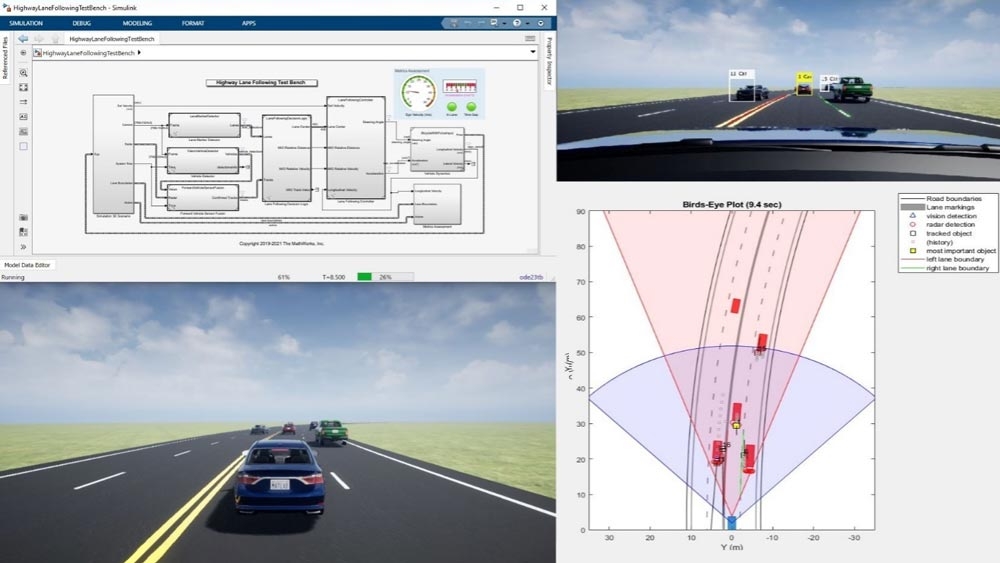
自动驾驶工具箱™提供用于设计、模拟和测试ADAS和自动驾驶系统的算法和工具。您可以设计和测试视觉和激光雷达感知系统,以及传感器融合、路径规划和车辆控制器。可视化工具包括鸟瞰图和传感器覆盖范围、探测和跟踪,以及视频、激光雷达和地图的显示。这个工具箱允许你导入和使用HERE高清实时地图数据和OpenDRIVE®道路网络。
使用Ground Truth Labeler应用程序,您可以自动标记Ground Truth,以训练和评估感知算法。对于硬件在环(HIL)测试和感知、传感器融合、路径规划和控制逻辑的桌面仿真,您可以生成和模拟驾驶场景。您可以在逼真的3D环境中模拟摄像机、雷达和激光雷达传感器输出,并在2.5 d模拟环境中模拟物体和车道边界的传感器检测。
自动驾驶工具箱提供常见的ADAS和自动驾驶功能的参考应用示例,包括前向碰撞预警、自动紧急制动、自适应巡航控制、车道保持辅助和代客泊车。工具箱支持C/ c++代万博1manbetx码生成,用于快速原型和HIL测试,支持传感器融合、跟踪、路径规划和车辆控制器算法。
开始:


检测车辆和车道在视觉感知系统中的参考应用。
长方体驾驶模拟
从雷达和摄像机传感器模型生成合成检测,并将这些检测合并到驾驶场景中,使用基于长方体的模拟器测试自动驾驶算法。使用Driving Scenario Designer应用程序定义道路网络、角色和传感器。导入预先构建的Euro NCAP测试和opdrive道路网络。


利用三维仿真环境记录合成传感器数据,开发车道标志检测系统,并在不同场景下测试该系统。
自动化地面真实标记
使用Ground Truth Labeler应用进行交互式和自动化的Ground Truth标签,方便对象检测、语义分割和场景分类。

测试感知算法
通过比较地面真实数据和算法输出来评估感知算法的性能。

评估车道检测输出与地面真相。

单目摄像机传感器仿真输出。


访问这里高清实时地图数据
从这里高清实时地图web服务读取地图数据,包括平铺地图层,包含详细的道路,车道,和定位信息。

使用这里的高清实时地图来验证车道配置。
可视化地图数据
使用流坐标来绘制车辆行驶时的位置。


三维环境中的行车路径规划和可视化
